控制系统的数学模型
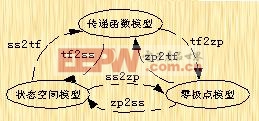 |
图2-18 三种模型之间的转换 |
说明:
ss2tf命令:将状态空间模型转换成传递函数模型。
格式为:[num,den]=ss2tf(A,B,C,D,iu)
式中,iu为输入的序号。转换公式为
ss2zp命令:将状态空间模型转换成零极点增益模型。
格式为:[Z, P, K]=ss2zp(A, B, C, D, iu)
式中,iu为输入的序号。
tf2ss命令:将传递函数模型转换成状态空间模型。
格式为:[A, B, C, D]=tf2ss(num, den)
tf2zp命令:将传递函数模型转换成零极点增益模型。
格式为:[Z, P, K]=tf2zp(num, den)
zp2ss命令:将零极点模型转换成状态空间模型。
格式为:[A, B, C, D]=zp2ss(Z, P, K)
zp2tf命令:将零极点模型转换成传递函数模型。
格式为:[num, den]=zp2tf(Z, P, K)
2.8.4控制系统建模
对简单系统的建模可直接采用三种基本模型:传递函数、零极点增益、状态空间模型。但实际中经常遇到几个简单系统组合成一个复杂系统。常见形式有:并联、串联、闭环及反馈等连接。
1. 并联:将两个系统按并联方式连接,在MATLAB中可用parallel函数实现。命令格式为:[nump, denp] = parallel(num1, den1, num2, den2) 其对应的结果为:Gp(s)=G1(s)+G2(s)
2. 串联:将两个系统按串联方式连接,在MATLAB中可用series函数实现。命令格式为:[nums, dens] = series(num1, den1, num2, den2) 其对应的结果为:Gs(s)=G1(s)+G2(s)
3. 闭环:将系统通过正负反馈连接成闭环系统,在MATLAB中可用feedback函数实现。命令格式为:[numf, denf] = feedback(num1, den1, num2, den2, sign) sign为可选参数,sign=-1为负反馈,而sign=1对应为正反馈。缺省值为负反馈。其对应的结果为:
 |
4. 单位反馈:将两个系统按反馈方式连接成闭环系统(对应于单位反馈系统),在MATLAB中可用cloop函数实现。命令格式为:[numc, denc] = cloop(num, den, sign) sign为可选参数,sign=-1为负反馈,而sign=1对应为正反馈。缺省值为负反馈。其对应的结果为:
 |
- 基于单片机实现摄像机运动控制系统的设计(05-30)
- 一种智能型全自动快速充电机的设计(07-20)
- 基于USB接口的数据采集与控制系统设计(09-21)
- 单级倒立摆控制系统的稳定性算法设计(03-02)
- 利用GaAs PHEMT设计MMIC LNA(11-15)
- 力控组态软件在光伏发电系统中的应用(02-24)