控制系统的数学模型
 |
T为惯性环节的时间常数,K为比例系数。
当输入信号为单位阶跃函数时,其环节的输出为
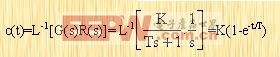 |
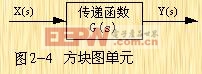
图2-4表示了一个方块图单元。指向方块的箭头表示输入,而从方块出来的箭头则表示输出。在这些箭头上标明了相应的信号。
应当指出,方块输出信号等于输入信号与方块中传递函数的乘积。
用方块图表示系统的优点是:只要依据信号的流向,将各元件的方块连结起来,就能够容易地组成整个系统的方块图,通过方块图,还可以评价每一个元件对系统性能的影响。
总之,方块图比物理系统本身更容易体现系统的函数功能。方块图包含了与系统动态特性有关的信息,但它不包括与系统物理结构有关的信息。因此,许多完全不同和根本无关的系统,可以用同一个方块图来表示。
应当指出,在方块图中没有明显表示出系统的主能源,而且对于一定的系统来说,方块图也不是唯一的。由于分析角度的不同,对于同一个系统,可以画出许多不同的方块图。
误差检测器 误差检测器产生的输出信号,等于控制系统的参考输入信号与反馈信号之差。在设计中,选择误差检测器是一件很重要的工作,需要仔细确定。因为误差检测器中的任何缺陷,都必然会降低整个系统的性能。图2-5表示了误差检测器的方块图。
需要注意的是,图中进行相加或相减的一些量,应具有相同的量纲和单位。
 |
闭环系统方块图 在图2-6上,表示了一个闭环系统的方块图。输出量C(s)反馈到相加点,并且在相加点与参考输入量R(s)进行比较。系统的闭环性质,在图上清楚地表示了出来。在这种情况下,方块的输出量C(s),等于方块的输入量E(s)乘以传递函数G(s)。
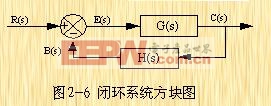 |
任何线性控制系统,都可以用由方块、相加点和分支点组成的方块图来表示。所谓分支点,就是由方块出来的输出信号,从这一点起同时进入另一个方块或相加点。
当输出量反馈到相加点与输入量进行比较时,必须将输出信号转变为与输入信号相同的形式。例如,在温度控制系统中,输出信号通常为被控温度。具有温度量纲的输出信号,在与输入信号进行比较之前,必须转变为力或位置。这种转换由反馈元件来完成,反馈元件的另一个重要作用,是在输出量与输入量进行比较之前,改变输出量。对于正在讨论的例子,反馈到相加点与输入量进行比较的反馈信号为B(s)=H(s)C(s)。
反馈信号B(s)与作用误差信号E(s)之比,叫做开环传递函数。即
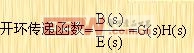 |
输出量C(s)与作用误差信号E(s)之比,叫做前向传递函数,因而
 |
如果反馈传递函数等于1,那么开环传递函数与前向传递函数相同。在图2-6所示系统中,输出量C(s)与输入量R(s)的关系,可推导如下:
C(s)=G(s)E(s)
E(s)=R(s)-B(s)=R(s)-H(s)C(s)
从上述方程中消去E(s),得
C(s)=G(s)[R(s)-H(s)C(s)]
于是可得
 | (2-17) |
C(s)与R(s)之间的传递函数,叫做闭环传递函数。这一传递函数,将闭环系统的动特性,与前向通道元件和反馈通道元件的动态特性联系在一起了。
由方程(2-17),可求得C(s)为
 |
因此,闭环系统的输出量,显然取决于闭环传递函数和输入量的性质。
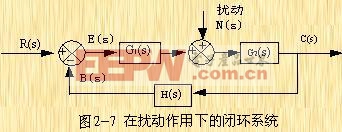
扰动作用下的闭环系统 图2-7为一个在扰动作用下的闭环系统。当两个输入量(参考输入量和扰动量)同时作用于线性系统时,可以对每一个输入量单独地进行处理,将与每一个输入量单独作用时相应的输出量叠加,即可得到系统的总输出量。每个输入量加进系统的形式,用相加点上的加号或减号来表示。
现在来讨论图2-7上表示的系统。在研究扰动量N(s)对系统的影响时,可以假设系统在开始时是静止的,并且假设无误差信号,这样就可以单独计算系统对扰动的响应CN(s)。这一响应可由下式求得:
 |
 |
另一方面,在研究系统对参考输入量的响应时,可以假设扰动量等于零。这时系统对参考输入量R(s)的响应CR(s)可由下式求得:
将上述两个单独的响应相加,就可以得到参考输入量和扰动量同时作用时的响应。换句话说,参考输入量R(s)和扰动量N(s)同时作用于系统时,系统的响应C(s)为
 |
另一方面,当G1(s)G2(s)H(s)的增益增大时,闭环传递函数CR(s)/R(s)趋近于1/H(s)。这表明,当 >>1时,闭环传递函数CR(s)/R(s)将变成与G1(s)和G2(s)无关,而只与H(s)成反比关系,因此G1(s)和G2(s)的变化,不影响闭环传递函数CR(s)/R(s)。这是闭环系统的另一个优点。可
- 基于单片机实现摄像机运动控制系统的设计(05-30)
- 一种智能型全自动快速充电机的设计(07-20)
- 基于USB接口的数据采集与控制系统设计(09-21)
- 单级倒立摆控制系统的稳定性算法设计(03-02)
- 利用GaAs PHEMT设计MMIC LNA(11-15)
- 力控组态软件在光伏发电系统中的应用(02-24)