自动控制系统是由若干环节组成的,环节具有各种各样的结构和功能。然而本节所讨论的典型环节并不是按照它们的作用原理和结构分类的,而是按照它们的动态特性或数字模型来区分。因为控制系统的运动情况只决定于所有各组成环节的动态特性及连接方式,而与这些环节具体结构和进行的物理过程不直接相关。从这一点出发,组成控制系统的环节可以抽象为几种典型环节,逐个研究和掌握这些典型环节的特性,就不难进一步综合研究整个系统的特性。
2.4.1比例环节 比例环节又称放大环节,其传递函数为  | (2-11) |
这表明,输出量与输入量成正比,动态关系与静态关系都一样,不失真也不迟延,所以又称为"无惯性环节"或"放大环节"。比例环节的特征参数只有一个,即放大系数K。工程上如无弹性变形的杠杆传动、电子放大器检测仪表、比例式执行机构等都是比例环节的一些实际例子。
2.4.2惯性环节 惯性环节又称非周期环节,其传递函数为  | (2-12) |
T为惯性环节的时间常数,K为比例系数。
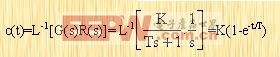
当输入信号为单位阶跃函数时,其环节的输出为 它是一条指数曲线,当时间t=3T~4T时,输出量才接近其稳态值。实际系统中,惯性环节是比较常见的,例如直流电机的励磁回路等。 2.4.3积分环节 积分环节的传递函数为  | (2-13) |
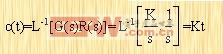
在单位阶跃输入的作用下,积分环节的输出c(t)为 这表明,只要有一个恒定的输入量作用于积分环节,其输出量就与时间成正比地无限增加。积分环节具有记忆功能,当输入信号突然除去时,输出总要变化下去。在控制系统设计中,常用积分环节来改善系统的稳态性能。 2.4.4微分环节 微分环节的传递函数为  | (2-14) |
理想微分环节的输出与输入量的变化速度成正比。在阶跃输入作用下的输出响应为一理想脉冲(实际上无法实现),由于微分环节能预示输出信号的变化趋势,所以常用来改善系统的动态特性。 实际上可实现的微分环节都具有一定的惯性,其传递函数如下: 它有一个负极点和一个位于S平面原点的零点。实际微分环节在单位阶跃输入作用下的输出响应为 2.4.5振荡环节 振荡环节的传递函数为  | (2-15) |
或 式中,T为振荡环节的时间常数;K为放大系数;ζ为振荡环节的阻尼比; 称为无阻尼自然振荡频率。 2.4.6延迟环节 延迟环节的传递函数为  | (2-16) |
延迟环节在单位阶跃输入作用下的输出响应为c(t)=1(t-T) 即输出完全复现输入,只是延迟了T时间。T为延迟环节的特征参数,称为"延迟时间"或"滞后时间"。 以上介绍了六种典型环节,这是控制系统中最见的基本环节 | 
 很小,可以忽略x-
很小,可以忽略x-