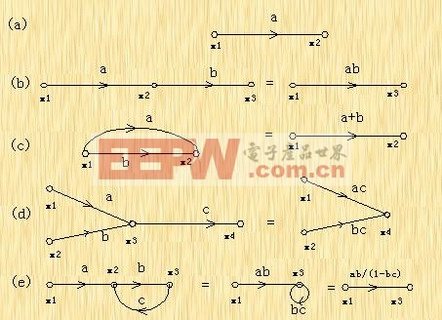
为了确定输入-输出关系,可以采用梅逊公式。这个公式后面将要介绍。也可以将信号流图简化成只包含输出和输入节点的形式。为了进行这种简化,需采用下列规则:
1. 如图2-10(a)所示,只有一个输出支路的节点的值为x2=ax1。
2. 串联支路的总传输,等于所有支路传输的乘积。因此,通过传输相乘,可以将串联支路合并为单一支路,如图2-10(b)所示。
3. 通过传输相加,可以将并联支路合并为单一支路,如图2-10(c)所示。
4. 混合节点可以消掉,如图2-10(d)所示。
5. 回路可以消掉,如图2-10(e)所示。
梅逊公式 用梅逊公式可以直接求信号流图的传输。表示为
 | (2-18) |
式中,Pk=第k条前向通道的通道增益或传输;
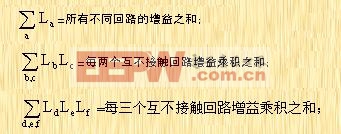
Δ=流图的特征式
=1-(所有不同回路的增益之和)+(每两个互不接触回路增益乘积之和)
-(每三个互不接触回路增益乘积之和)+…
Δk=在除去与第k条前向通道相接触的回路的流图中,第k条前向通道特征式的余因子。
总之,熟悉了梅逊公式之后,根据它去求解系统的传输,远比用方块图变换方法简便有效,对于复杂的多环系统和多输入、多输出系统尤其明显。因此,信号流图得到了广泛的实际应用,并常用于控制系统的计算机辅助设计。
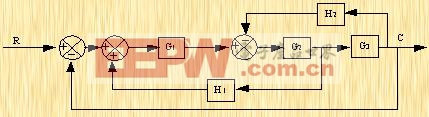
例2-4 将图2-11所示的系统方框图化为信号流图之。求系统传递函数C(s)/R(s)。
在这个系统中,输入量R(s)和输出量C(s)之间,只有一条前向通道。前向通道的增益为
P1=G1G2G3
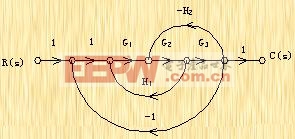
从图2-12可以看出,这里有三个单独的回路。这些回路的增益为
L1=G1G2H1
L2=-G2G3H2
L3=-G1G2G3
应当指出,因为所有三个回路具有一条公共支路,所以这里没有不接触的回路。因此,特征式Δ为
Δ=1-(L1+L2+L3)
=1-G1G2H1+G2G3H2+G1G2G3
沿联接输入节点和输出节点的前向通道,特征式的作因子Δ1,可以通过除去与该通道接触的回路的方法而得到。因为通道P1与三个回路都接触,所以得到
Δ1=1
因此,输入量R(s)和输出量C(s)之间的总增益,或闭环传递函数为
这与通过方块图简化所得到的闭环传递函数完全相同。这样,利用梅逊公式,不必对流图进行简化,就能够求得总增益C(s)/R(s)。
例2-5 根据梅逊公式求图2-13的信号流图的总传输。
解 此系统有六个回环,即ab、cd、ef、ij和kfdb,因此
两个互不接触的回环有七种组合,即abef、abgh、abij、cdgh、cdij、efij及kfdbij,所以
三个互不接触的回环只有ab、ef和ij,故
由此可求特征式
从源点到阱点有两条前向通道。一条为acegi,它与所有的回环均有接触,因此
P1=acegi
Δ1=1
另一条前向通道为kgi它不与回环cd接触,所以
P2=kgi
Δ2=1-cd
将以上结果代入式(2-18),可得总传输
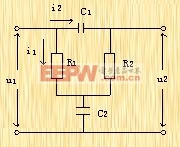
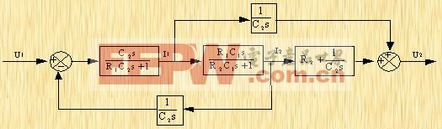
例2-6 已知RC电路如图2-14所示,请画出其结构图。
解:根据电路的特性,由图可知
中间回路:
由(2-19)式知:
由(2-21)式知:
由(2-20)式知:
则由(2-22)、(2-23)、(2-24)式求出结构图如下:
在这一类系统结构图的求解过程中,需要注意的是,其解不是唯一的。