国外牛人教你快速打造首台机器人
时间:06-17
来源:互联网
点击:
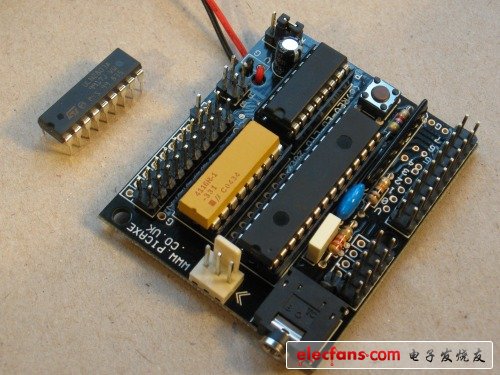
贴士:插入新芯片
那些未用过的新芯片的两组针脚间距一般都比较宽,在插入插槽之前,把针脚捏近。你去尝试去插一颗新芯片,你就会明白我说什么了。
贴士:拔出旧芯片
把一把平的螺丝刀放在芯片的下面,从下往上慢慢的撬,你会发现很容易就能把它拔出来。
事实上,不久以后,你就会希望这个控制器仅仅就是一个控制器。你之后会为其他的伺服电机控制和马达控制买另外的开发板。这些班会从微控制器上得到命令,然后你的机器人可以同时做很多事情。
当然,你可以做这个设备是一个很了不起的事情。
如果没有机器人外壳,做一个外壳
为了尽量简单的完成机器人的制作,我们只需要把所有部分黏合在一起,就可以完工了。
如果你愿意的话,你也可以把它弄得更漂亮。需要强调的是我们使用两个主轮,每个用一个马达驱动。控制它们前进机器人就会前进;控制一前一后,则会原地打转;如果一个动,一个不动,就好像向一边滑动的感觉。
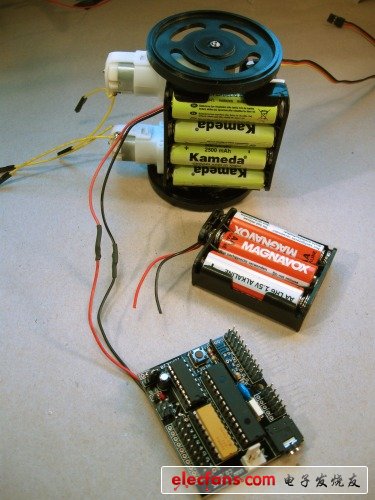
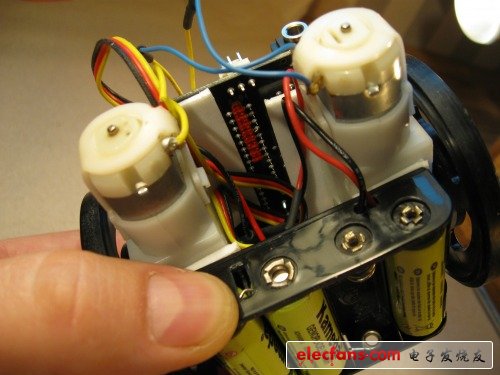
你需要做的事是把电池盒贴在马达上面,利用双面胶。如果电池装在里面,同时轮子足够大能够把它们放在车轴下面,这个东西的就可以自己保持平衡。



最重要的事轮子着地,其他部位要差不多平衡。它稍微向后倾斜也不是很重要。

这次我用四个电池的电池槽,因为这比较大,可以轻易把其他东西粘在上面。

如果你用非充电电池,只需要三个电池,有一个小提醒:从旧收音机或其它地方弄一个伸缩天线,截取一段,然后摆在电池盒的一个卡槽里,这样就OK了。
下一步是把这块板装在机器人上,然后连接上所有东西
第一步:把所有电池都拿出来,或者至少拿掉一个,以保证你不会意外烧掉任何东西。我们的机器人没有任何开关。把电池装上去,它就可以动了。现在我们要它停下来,只能拆掉一个电池。
有些电池盒是有线的,有些电池盒上有一个和板上架子相匹配的夹子。如果你有相应的架子,接上去就搞定了。如果你和我一样是有导线的,那就把板上的夹子剪掉,然后红和红,黑和黑连上去。
电池的正极要连接到板上的红线。
把其它东西连到板上
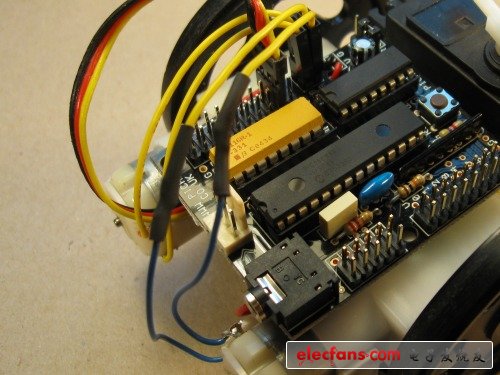
你伺服电机的颜色或许不同,褐色或黑色(地线)在外围,红色(火线)在中间,黄色或白色(信号线)在板子的里面。这样说或许你会明白多一点。如果你有读过那个说明。现在你要做的是记住每个线,将他正确连接到伺服电机上面。
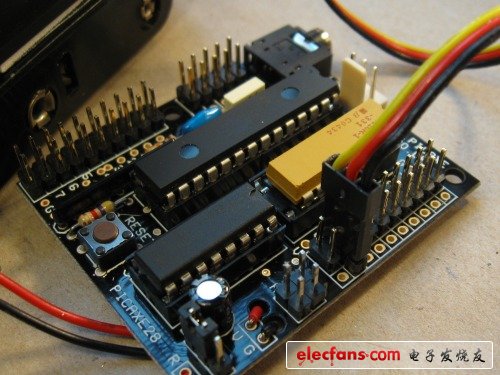
用双面胶把板子粘在机器人上面。
确保这小插座(板的端部的金属圈)安装好,以确保电缆能够轻易插入。因为你会多次重复这个动作。同是要确保板子的底部没有触碰到任何金属,这会导致短路。把马达连接上之前焊上去的A&B针脚。
一个马达的两根导线连到板上的A,另一个马达的连到B,没规定哪个马达要连到哪个接口,我们会编程控制剩下的东西。
我们需要把伺服电机转到中间。当然,你可以用手完成这个过程,但最明智的做法是用微控制器操纵这个伺服电机。因为迟点你可以安装机器人的“脸”,超向前,像微控制器控制的那样。
根据你的电脑系统,下载相应的软件以写程序。
安装驱动和下载线,把下载线插进板上的接口。
装上机器人的所有电池,然后等待,等待,如果未搵到异味和看到火花或者烟雾,你可以进行以下的操作。

大部分版本的Picaxe编程软件在其菜单栏有“options”这个选项,进入,选择一个“mode”页面,有些编辑器在你打开程序的时候自动打开这个页面。
接下来你要找到一个“Firmware”的按键,或者是“Checkfirmwareversion”,点击它。
接下来就是编辑器通过下载线发送信息给微控制器,同时确认是Picaxe的哪款芯片,然后会反馈回来类似“28X1/40X1”之类的信息,这会在显示屏上显示出来。
如果有这些显示,很好,证明你已经连接上了。这时在屏幕上某个地方,你需要设置编辑器的型号,把其设为28X1/40X1。
如果出错,没有找到微控制器或者其他提示错误,你要阅读其手册寻求帮助。通常都是很简单的,所以碰到错误的时候尽管去尝试解决。或者在另一电脑上重试,看它是怎样工作的。然后再试,再进行错误跟踪等。
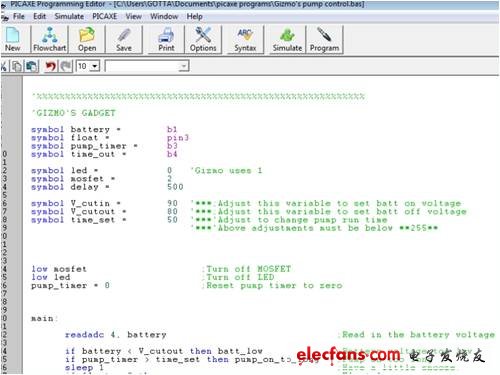
然后,进入主程序编辑器,他就像一个文档编辑器,如果没有打开任何项目,在“file”下打开“NewBasic”/“New”。然后写下以下程序:
servo0,150
wait2
这是个非常简单的头程序,第一行是告诉微控制器这里有个伺服电机在0端口,同时它要被设置到中间位置,也就是150那里。
第二行是等候两秒,让点击有时间转动起来。
经过这个之后,微控制器不再做任何操作,会毫无目的的运行。
机器人 PIC USB 红外 电压 Linux 万用表 电子 电阻 开关电源 传感器 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)