如何制作一个最简单的机器人
时间:02-23
来源:互联网
点击:
这是一个非常简单的避障机器人,甚至简单到没有使用控制芯片和驱动电路,使用的都是我们日常生活中随处可见的一些东西,但是却实现了基本的避障功能。

----------------------------------------------------------
第一步:准备材料
首先我们要准备所有可能用到的零件,我几乎都是从旧玩具上面拆下来的,我想你在旧的无线电上也可以找得到。
-AA电池盒->用来装电池
-焊锡丝->用来焊接
-绝缘导线->连接电池与电机
-2节AA电池->驱动电机
-2个1.5V电机(最好规格相同)->驱动机器人
-一个拨动开关->作为机器人的开关
-2个碰撞开关
-1到2个回形针->用来延长碰撞开关的触须
-胶棒->固定
第二步:准备工具
我从我爸爸那里借来了全部所需的工具。
线钳->用来剪线和剥线皮
尖嘴钳->用来弯曲回形针
热胶枪->配合胶棒来把碰撞开关和拨动开关固定在电池盒上
电烙铁->焊接
万用表->检查电池

第三步:正式开始
首先检查电池电量
用万用表测量电池电压,如果电池电压接近1.5V,可以使用,否则最好购买新电池


第四步:连线
用电烙铁和焊锡丝将几根导线焊接到电池盒上。最好注意一下导线的颜色,正极接出来的线用红色,负极接出来的线用黑色。

第五步:固定碰撞开关
用热熔胶将碰撞开关固定在电池盒上如图示的位置上。

第六步:加工触须(1)
用钳子将回形针拉直。

第七步:加工触须(2)
将拉直的回形针剪断,得到两根长度合适的铁丝。(你也可以用一个回形针来制作一根触须,一切由你自己选择)。



第八步:加工触须(3)
利用尖嘴钳将两根铁丝弯曲成图中的形状。
尽量让两根铁丝形状一样,你可以将两根铁丝一起湾,这样可以保证形状的一致。

第九步:加工触须(4)
用热熔胶将两根触须固定到碰撞开关的触臂上。

第十步:电机
将电机用热熔胶粘在电池盒上,保证电机与电池盒成大概40度的夹角。

第十一步:轮子
我从一个玩具上拆下了这个全向轮,你可以在五金店里买到。
用热熔胶将它粘在电池盒的末端,和两个电机形成一个三点支撑,注意全向轮要比电池盒稍微低一些,这样电池盒就不会触到地,机器人行走起来会更加的平稳和快速。


第十二步:另外一些需要的导线
具体的接线方式可以参考我后面给出的原理图

第十三步:装饰
这一步,根据个人的喜好和条件尽情的发挥吧!你可以参考我的装饰方案,也可以发挥你自己的想象力。
我还在电机的旋转轴上缠了一些胶带,这样行走起来更平稳。

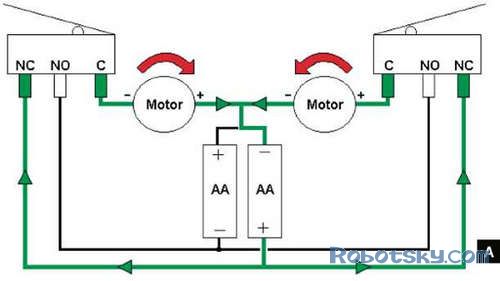
第十四步:电路原理图
当机器人的一边撞到障碍物上时,左边或右边的碰撞开关闭合,导致右边或左边的电机反转,从而使机器人避开障碍物。仔细研究一下电路原理图,你就会明白机器人的避障原理了。
来源:机器人天空
----------------------------------------------------------
第一步:准备材料
首先我们要准备所有可能用到的零件,我几乎都是从旧玩具上面拆下来的,我想你在旧的无线电上也可以找得到。
-AA电池盒->用来装电池
-焊锡丝->用来焊接
-绝缘导线->连接电池与电机
-2节AA电池->驱动电机
-2个1.5V电机(最好规格相同)->驱动机器人
-一个拨动开关->作为机器人的开关
-2个碰撞开关
-1到2个回形针->用来延长碰撞开关的触须
-胶棒->固定
第二步:准备工具
我从我爸爸那里借来了全部所需的工具。
线钳->用来剪线和剥线皮
尖嘴钳->用来弯曲回形针
热胶枪->配合胶棒来把碰撞开关和拨动开关固定在电池盒上
电烙铁->焊接
万用表->检查电池
第三步:正式开始
首先检查电池电量
用万用表测量电池电压,如果电池电压接近1.5V,可以使用,否则最好购买新电池
第四步:连线
用电烙铁和焊锡丝将几根导线焊接到电池盒上。最好注意一下导线的颜色,正极接出来的线用红色,负极接出来的线用黑色。
第五步:固定碰撞开关
用热熔胶将碰撞开关固定在电池盒上如图示的位置上。
第六步:加工触须(1)
用钳子将回形针拉直。
第七步:加工触须(2)
将拉直的回形针剪断,得到两根长度合适的铁丝。(你也可以用一个回形针来制作一根触须,一切由你自己选择)。
第八步:加工触须(3)
利用尖嘴钳将两根铁丝弯曲成图中的形状。
尽量让两根铁丝形状一样,你可以将两根铁丝一起湾,这样可以保证形状的一致。
第九步:加工触须(4)
用热熔胶将两根触须固定到碰撞开关的触臂上。
第十步:电机
将电机用热熔胶粘在电池盒上,保证电机与电池盒成大概40度的夹角。
第十一步:轮子
我从一个玩具上拆下了这个全向轮,你可以在五金店里买到。
用热熔胶将它粘在电池盒的末端,和两个电机形成一个三点支撑,注意全向轮要比电池盒稍微低一些,这样电池盒就不会触到地,机器人行走起来会更加的平稳和快速。
第十二步:另外一些需要的导线
具体的接线方式可以参考我后面给出的原理图
第十三步:装饰
这一步,根据个人的喜好和条件尽情的发挥吧!你可以参考我的装饰方案,也可以发挥你自己的想象力。
我还在电机的旋转轴上缠了一些胶带,这样行走起来更平稳。
第十四步:电路原理图
当机器人的一边撞到障碍物上时,左边或右边的碰撞开关闭合,导致右边或左边的电机反转,从而使机器人避开障碍物。仔细研究一下电路原理图,你就会明白机器人的避障原理了。
来源:机器人天空
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)
- 工业机器人技术(02-23)