基于LabVIEW构建智能的移动机器人及无人驾驶车
时间:10-27
来源:互联网
点击:
作者:汤敏 NI中国技术市场工程师 时间:2009-10
引言
移动机器人构成复杂、应用灵活,目前商业化程度还不高,相对处于前沿研究的阶段,因此一直以来都是科学家和工程师们关注的重点。 移动机器人具有某些共同的构架和组成部分,是一个融合了众多机电系统和子系统的综合体系,并通过这些组成部分与子系统的有机结合协调工作,虽然部分子系统已有现成的软硬件工具和解决方案,但如何快速地把各子系统集成在一起、进行早期的整体功能性验证,就成了决定机器人设计成败的关键性环节。
图形化系统设计—机器人设计的前沿方法
在Google X PRIZE机构、FIRST组织(科学技术的启示与认知组织)、RoboCup以及美国国防高级研究计划局(DARPA)之间展开的竞争推进了机器人学领域的创新。富有创新思维的开发者们将机器人学的前沿方法推进到了图形化系统设计。在LabVIEW图形化编程平台下,机器人学的领域专家能够对复杂的机器人方案进行快速的原型设计。这些创新工作者能够不用关心底层的实现细节,可以将注意力集中到解决手上的工程问题中去。
机器人设计通常包含以下部分的工作内容,如图1所示。
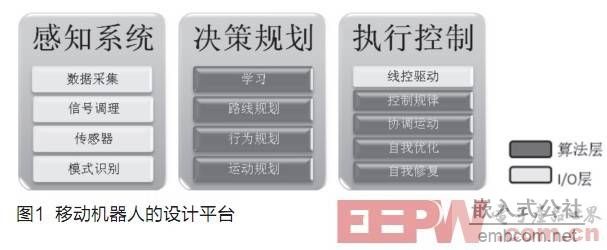
感知系统——连接到陀螺仪、CCD、光电、超声等传感器,获取并处理信息。
决策规划——相当于机器人的‘大脑’,根据算法进行控制决策,完成管理协调、信息处理、运动规划等任务。
执行控制——根据具体的作业指令,通过驱动控制器、编码器和电机完成机器人的伺服控制与运动执行。
网络通讯与控制——机器人各子系统间的通讯网络,完成分布式控制与实时控制。
过去,由于在每个领域中必须使用各自的传统工具,其中涉及的知识具有较大的纵向深度,机械工程师、电气工程师以及程序员团队都各自领导机器人学的开发。LabVIEW和NI硬件提供了一个独特的、功能多样的平台,它提供了一套标准的可供所有机器人设计人员使用的工具,从而使机器人开发得到了统一。
来自弗吉尼亚理工大学机器人学与机械实验室(RoMeLa)正在进行智能动态拟人机器人(DARwin)的双足类人机器人的开发和研究,目的是对假肢进行研究和开发。DARwin使用NI LabVIEW图形化系统设计平台,能够实现全范围运动,并且能够准确地模拟人类运动。LabVIEW可以分析动态双足运动、设计并开发机器人控制系统的原型。如果开发的原型能够令人满意地工作,他们就将控制算法部署到运行LabVIEW实时模块的PC/104单板计算机上。
通过LabVIEW,设计人员无需成为计算机专家或程序员,就可以开发高级机器人。例如,一位只有有限LabVIEW和机器视觉经验的学生在短短几个小时之内,就设计了一个让机器人利用它带有的IEEE 1394相机和NI机器视觉开发模块跟踪一个红球的算法。工程师们使用LabVIEW和NI硬件,就可以使用功能强大的图形化编程语言快速地设计并开发复杂算法的原型;并通过代码生成方便地将控制算法部署到PC、FPGA、微控制器或实时系统之中;还可以与几乎所有的传感器、执行器进行连接。通过LabVIEW和NI硬件平台,可以支持CAN、以太网、串口、USB等多种接口,方便构建机器人系统的通讯网络。领域专家不仅仅能够完成机械工程师的工作,还能够成为机器人设计者。
实例分析1:南洋理工大学使用NI LabVIEW设计救生机器人蜘蛛
南洋理工大学开发了一个用于支持营救工作的六足机器人蜘蛛。它是一个尺寸较小、可移动的智能机器人,在搜寻被陷的受害者时,它可以越过障碍并到达通常难以触及的地方。替代如清扫雷区使之无雷化等危险任务中的工作人员也是机器人蜘蛛的另一个潜在应用领域。
他们设计了一个高度可移动的行走方案,它由六只独立的下肢组成,可以任意方向移动机器人,即使在机器人移动通常不可行或过于危险的地带。行走与旋转均属于模仿六足昆虫而得的基本的高层次运动模式。通过三条下肢移动而另外三条下肢抬高,机器人可以达到期望的行走速度,并提供恶劣地带所需的足够平衡。爬行时,机器人可以挤压通过紧凑的空间和狭缝。单下肢的低层次运动步态是3D空间内的几何原语,如长方形或圆形轨道。
24个自由度的多功能机电系统及智能运动控制
下肢结构与运动控制构成了机器人蜘蛛关键特性的一部分。24只智能DC有刷电机共同驱动这些下肢,并充当行走结构中不可或缺的关节。这样得到了一个坚固的轻型结构,从而降低了功耗并改善了运动动态特性。
除了这些下肢,机器人蜘蛛的特性还在于典型的自主机器人子系统,其中包括机器视觉、远程测量和无线通信。机器人坚固的壳体内包含有嵌入式硬件、两节7.2伏的锂聚合物电池和电量测量装置。任务参数、I/O设置和新的运动步态均可以通过无线通信或可移动存储介质传递。
机器人蜘蛛的低层次运动有赖于运行时计算的复杂数学模型。凭借ADI公司的Blackfin处理器的高级嵌入式计算能力和LabVIEW的确定性实时性能,机器人的运动表现得有力而平稳。基于NI LabVIEW嵌入式模块的程序连续运行一个逆动力学算法,算法包含三角函数和矩阵运算,求解恰当的关节角q1与q2,以沿着3D空间内的期望轨线精确移动末端执行装置。
所有六足的关节角度的计算并行完成以确保动态运动,相应地也得到了连续计算所得的24个电机的设置点。这些设置点通过一个串行RS485网络传递至每只电机,并由分散PD控制器转换为实际执行动作。通过同样的网络,完成所有24只执行装置的位置、反馈和温度读数的采集。
引言
移动机器人构成复杂、应用灵活,目前商业化程度还不高,相对处于前沿研究的阶段,因此一直以来都是科学家和工程师们关注的重点。 移动机器人具有某些共同的构架和组成部分,是一个融合了众多机电系统和子系统的综合体系,并通过这些组成部分与子系统的有机结合协调工作,虽然部分子系统已有现成的软硬件工具和解决方案,但如何快速地把各子系统集成在一起、进行早期的整体功能性验证,就成了决定机器人设计成败的关键性环节。
图形化系统设计—机器人设计的前沿方法
在Google X PRIZE机构、FIRST组织(科学技术的启示与认知组织)、RoboCup以及美国国防高级研究计划局(DARPA)之间展开的竞争推进了机器人学领域的创新。富有创新思维的开发者们将机器人学的前沿方法推进到了图形化系统设计。在LabVIEW图形化编程平台下,机器人学的领域专家能够对复杂的机器人方案进行快速的原型设计。这些创新工作者能够不用关心底层的实现细节,可以将注意力集中到解决手上的工程问题中去。
机器人设计通常包含以下部分的工作内容,如图1所示。
感知系统——连接到陀螺仪、CCD、光电、超声等传感器,获取并处理信息。
决策规划——相当于机器人的‘大脑’,根据算法进行控制决策,完成管理协调、信息处理、运动规划等任务。
执行控制——根据具体的作业指令,通过驱动控制器、编码器和电机完成机器人的伺服控制与运动执行。
网络通讯与控制——机器人各子系统间的通讯网络,完成分布式控制与实时控制。
过去,由于在每个领域中必须使用各自的传统工具,其中涉及的知识具有较大的纵向深度,机械工程师、电气工程师以及程序员团队都各自领导机器人学的开发。LabVIEW和NI硬件提供了一个独特的、功能多样的平台,它提供了一套标准的可供所有机器人设计人员使用的工具,从而使机器人开发得到了统一。
来自弗吉尼亚理工大学机器人学与机械实验室(RoMeLa)正在进行智能动态拟人机器人(DARwin)的双足类人机器人的开发和研究,目的是对假肢进行研究和开发。DARwin使用NI LabVIEW图形化系统设计平台,能够实现全范围运动,并且能够准确地模拟人类运动。LabVIEW可以分析动态双足运动、设计并开发机器人控制系统的原型。如果开发的原型能够令人满意地工作,他们就将控制算法部署到运行LabVIEW实时模块的PC/104单板计算机上。
通过LabVIEW,设计人员无需成为计算机专家或程序员,就可以开发高级机器人。例如,一位只有有限LabVIEW和机器视觉经验的学生在短短几个小时之内,就设计了一个让机器人利用它带有的IEEE 1394相机和NI机器视觉开发模块跟踪一个红球的算法。工程师们使用LabVIEW和NI硬件,就可以使用功能强大的图形化编程语言快速地设计并开发复杂算法的原型;并通过代码生成方便地将控制算法部署到PC、FPGA、微控制器或实时系统之中;还可以与几乎所有的传感器、执行器进行连接。通过LabVIEW和NI硬件平台,可以支持CAN、以太网、串口、USB等多种接口,方便构建机器人系统的通讯网络。领域专家不仅仅能够完成机械工程师的工作,还能够成为机器人设计者。
实例分析1:南洋理工大学使用NI LabVIEW设计救生机器人蜘蛛
南洋理工大学开发了一个用于支持营救工作的六足机器人蜘蛛。它是一个尺寸较小、可移动的智能机器人,在搜寻被陷的受害者时,它可以越过障碍并到达通常难以触及的地方。替代如清扫雷区使之无雷化等危险任务中的工作人员也是机器人蜘蛛的另一个潜在应用领域。
他们设计了一个高度可移动的行走方案,它由六只独立的下肢组成,可以任意方向移动机器人,即使在机器人移动通常不可行或过于危险的地带。行走与旋转均属于模仿六足昆虫而得的基本的高层次运动模式。通过三条下肢移动而另外三条下肢抬高,机器人可以达到期望的行走速度,并提供恶劣地带所需的足够平衡。爬行时,机器人可以挤压通过紧凑的空间和狭缝。单下肢的低层次运动步态是3D空间内的几何原语,如长方形或圆形轨道。
24个自由度的多功能机电系统及智能运动控制
下肢结构与运动控制构成了机器人蜘蛛关键特性的一部分。24只智能DC有刷电机共同驱动这些下肢,并充当行走结构中不可或缺的关节。这样得到了一个坚固的轻型结构,从而降低了功耗并改善了运动动态特性。
除了这些下肢,机器人蜘蛛的特性还在于典型的自主机器人子系统,其中包括机器视觉、远程测量和无线通信。机器人坚固的壳体内包含有嵌入式硬件、两节7.2伏的锂聚合物电池和电量测量装置。任务参数、I/O设置和新的运动步态均可以通过无线通信或可移动存储介质传递。
机器人蜘蛛的低层次运动有赖于运行时计算的复杂数学模型。凭借ADI公司的Blackfin处理器的高级嵌入式计算能力和LabVIEW的确定性实时性能,机器人的运动表现得有力而平稳。基于NI LabVIEW嵌入式模块的程序连续运行一个逆动力学算法,算法包含三角函数和矩阵运算,求解恰当的关节角q1与q2,以沿着3D空间内的期望轨线精确移动末端执行装置。
所有六足的关节角度的计算并行完成以确保动态运动,相应地也得到了连续计算所得的24个电机的设置点。这些设置点通过一个串行RS485网络传递至每只电机,并由分散PD控制器转换为实际执行动作。通过同样的网络,完成所有24只执行装置的位置、反馈和温度读数的采集。
机器人 LabVIEW 陀螺仪 传感器 编码器 机器视觉 FPGA USB 智能机器人 嵌入式 ADI 仿真 触摸屏 虚拟仪器 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 工业机器人技术(02-23)