基于LabVIEW构建智能的移动机器人及无人驾驶车
时间:10-27
来源:互联网
点击:
图形化的实时系统设计平台
机器人蜘蛛应用软件是利用面向Blackfin处理器的LabVIEW嵌入式模块编程实现的。LabVIEW为高层次编程、图形化调试、图形化多任务处理和确定性的实时行为,提供了一个理想的嵌入式软件平台。面向对象的设计模式有助于进一步控制图形化层次上的复杂度。例如电机或传感器等主要对象,通过LabVIEW中表示类的功能性全局变量加以抽象。主要的应用框架由以下多个任务组成。
● 顶层主循环对由一个经典状态机表示的动作进行规划,而状态机通过软件队列和同步方法(如信号量)与其他循环连接。通信任务保持一个与外部世界的无线数据连接。
● 视觉任务负责低层次的图像处理和距离读数。
● 运动控制任务管理高层次的运动模式与低层次的肢体控制,并监测马达的位置与状态。
● 日常任务充当一个通用错误处理器。检测事件与异常,并将其及时间记录到可移动的存储介质,以供后续读取。
通过采用LabVIEW嵌入式模块所提供的图形化编程环境,以及Blackfin处理器的高处理器性能,开发周期也大为缩短。基于LabVIEW的图形化快速调试模式在算法的工程实现过程中非常有用,缩短了5倍的开发时间。
实例分析2:弗吉尼亚理工大学使用NI LabVIEW设计全自主地面车参加DARPA 城市挑战赛
DARPA城市挑战赛需要设计一辆全自主地面车能够在城市环境中自动导航行驶。在整个赛程中,全自主车需要在6小时内穿越60英里,途经道路、路口和停车场等各种交通状态。
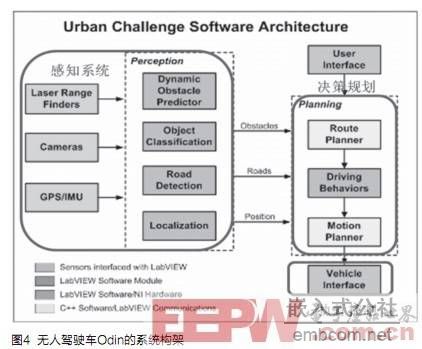
来自弗吉尼亚理工大学的团队需要在12个月开发出全自主地面车,他们将开发任务分成4个主要部分:基础平台、感知系统、决策规划和通讯架构,如图4所示。每一部分都基于NI的软硬件平台进行开发:通过NI硬件与现有车载系统进行交互,并提供操作接口;使用LabVIEW图形化编程环境来开发系统软件,包括通讯架构、传感器处理和目标识别算法、激光测距仪和基于视觉的道路检测、驾驶行为控制、以及底层的车辆接口。
参赛车Odin是2005年福特翼虎(Escape)混合动力型越野车,并为自主驾驶做了一定程度的改装。NI CompactRIO系统与翼虎操控系统进行交互,通过线控驱动的方式控制油门、方向盘、转向和制动。利用LabVIEW控制设计与仿真模块开发了路径曲率和速度控制系统,并通过LabVIEW实时模块和FPGA模块部署到CompactRIO硬件平台加以实现,从而建立了一个独立的车辆控制平台。与此同时使用LabVIEW触摸屏模块和NI TPC - 2006触摸屏构建用户界面并安装在控制台。
通过LabVIEW开发环境,团队快速可以构建系统原型并加快设计的往复周期。LabVIEW与硬件的无缝连接,对于执行某些关键操作如传感器处理和车辆控制是至关重要的。由于城市挑战赛问题复杂且开发时间很短,这些因素对于开发团队的成功发挥了关键作用。
结语
图形化系统设计对于继续加快机器人设计中的创新而言是必不可少的。复杂的传统工具可能会阻碍机器人技术的进步。LabVIEW提供了一个综合的、可扩展的平台,能够横跨设计、原型开发和部署阶段,因此工程师们能够不用为微小的实现细节所困扰,可以更加关注机器人本身。他们可以使用同样强大的平台,对微控制器直至FPGA等各种控制器进行编程;还可以同几乎任何传感器和执行器发送与接收信号;设计并仿真动态控制系统;以及实现进行远程监视或控制机器人的接口。LabVIEW图形化系统设计平台通过为所有机器人设计者提供一个统一的平台,鼓励设计更为精妙的机器人。
参考文献:
[1] 嵌入式图形系统设计助力救生机器人蜘蛛[R/OL]. http://sine.ni.com/cs/app/doc/p/id/cs-11745
[2]Victor Tango车队“Odin”战车杀手锏:应用NI LabVIEW助威 DARPA无人驾驶汽车城市挑战赛[R/OL]. http://sine.ni.com/cs/app/doc/p/id/cs-11323
[3] NI LabVIEW 虚拟仪器动力之源[R/OL].http://www.ni.com/labview/zhs/
[4] Nof, Shimon Y. Handbook of Industrial Robotics (2nd Edition ed)[M]. John Wiley & Sons, 1999
[5] Menzel P, D'Aluisio F . Robo sapiens: evolution of a new species[M]. The MIT Press,2000
机器人蜘蛛应用软件是利用面向Blackfin处理器的LabVIEW嵌入式模块编程实现的。LabVIEW为高层次编程、图形化调试、图形化多任务处理和确定性的实时行为,提供了一个理想的嵌入式软件平台。面向对象的设计模式有助于进一步控制图形化层次上的复杂度。例如电机或传感器等主要对象,通过LabVIEW中表示类的功能性全局变量加以抽象。主要的应用框架由以下多个任务组成。
● 顶层主循环对由一个经典状态机表示的动作进行规划,而状态机通过软件队列和同步方法(如信号量)与其他循环连接。通信任务保持一个与外部世界的无线数据连接。
● 视觉任务负责低层次的图像处理和距离读数。
● 运动控制任务管理高层次的运动模式与低层次的肢体控制,并监测马达的位置与状态。
● 日常任务充当一个通用错误处理器。检测事件与异常,并将其及时间记录到可移动的存储介质,以供后续读取。
通过采用LabVIEW嵌入式模块所提供的图形化编程环境,以及Blackfin处理器的高处理器性能,开发周期也大为缩短。基于LabVIEW的图形化快速调试模式在算法的工程实现过程中非常有用,缩短了5倍的开发时间。
实例分析2:弗吉尼亚理工大学使用NI LabVIEW设计全自主地面车参加DARPA 城市挑战赛
DARPA城市挑战赛需要设计一辆全自主地面车能够在城市环境中自动导航行驶。在整个赛程中,全自主车需要在6小时内穿越60英里,途经道路、路口和停车场等各种交通状态。
来自弗吉尼亚理工大学的团队需要在12个月开发出全自主地面车,他们将开发任务分成4个主要部分:基础平台、感知系统、决策规划和通讯架构,如图4所示。每一部分都基于NI的软硬件平台进行开发:通过NI硬件与现有车载系统进行交互,并提供操作接口;使用LabVIEW图形化编程环境来开发系统软件,包括通讯架构、传感器处理和目标识别算法、激光测距仪和基于视觉的道路检测、驾驶行为控制、以及底层的车辆接口。
参赛车Odin是2005年福特翼虎(Escape)混合动力型越野车,并为自主驾驶做了一定程度的改装。NI CompactRIO系统与翼虎操控系统进行交互,通过线控驱动的方式控制油门、方向盘、转向和制动。利用LabVIEW控制设计与仿真模块开发了路径曲率和速度控制系统,并通过LabVIEW实时模块和FPGA模块部署到CompactRIO硬件平台加以实现,从而建立了一个独立的车辆控制平台。与此同时使用LabVIEW触摸屏模块和NI TPC - 2006触摸屏构建用户界面并安装在控制台。
通过LabVIEW开发环境,团队快速可以构建系统原型并加快设计的往复周期。LabVIEW与硬件的无缝连接,对于执行某些关键操作如传感器处理和车辆控制是至关重要的。由于城市挑战赛问题复杂且开发时间很短,这些因素对于开发团队的成功发挥了关键作用。
结语
图形化系统设计对于继续加快机器人设计中的创新而言是必不可少的。复杂的传统工具可能会阻碍机器人技术的进步。LabVIEW提供了一个综合的、可扩展的平台,能够横跨设计、原型开发和部署阶段,因此工程师们能够不用为微小的实现细节所困扰,可以更加关注机器人本身。他们可以使用同样强大的平台,对微控制器直至FPGA等各种控制器进行编程;还可以同几乎任何传感器和执行器发送与接收信号;设计并仿真动态控制系统;以及实现进行远程监视或控制机器人的接口。LabVIEW图形化系统设计平台通过为所有机器人设计者提供一个统一的平台,鼓励设计更为精妙的机器人。
参考文献:
[1] 嵌入式图形系统设计助力救生机器人蜘蛛[R/OL]. http://sine.ni.com/cs/app/doc/p/id/cs-11745
[2]Victor Tango车队“Odin”战车杀手锏:应用NI LabVIEW助威 DARPA无人驾驶汽车城市挑战赛[R/OL]. http://sine.ni.com/cs/app/doc/p/id/cs-11323
[3] NI LabVIEW 虚拟仪器动力之源[R/OL].http://www.ni.com/labview/zhs/
[4] Nof, Shimon Y. Handbook of Industrial Robotics (2nd Edition ed)[M]. John Wiley & Sons, 1999
[5] Menzel P, D'Aluisio F . Robo sapiens: evolution of a new species[M]. The MIT Press,2000
机器人 LabVIEW 陀螺仪 传感器 编码器 机器视觉 FPGA USB 智能机器人 嵌入式 ADI 仿真 触摸屏 虚拟仪器 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 工业机器人技术(02-23)