灵猴机器人应用方案 采用机械臂实现电芯的自动分选
近几年,随着新能源汽车市场快速扩张,储能电池需求也正在加速增长,以致中国锂离子动力电池需求也将猛涨,其中动力电池成为锂离子电池产业增长的主导力量。
据统计显示,2015年中国锂电池产量为46.80GWH;2016年达到62.34GWH,同比增长33.2%。预计到2020年中国锂离子电池市场规模将达到170.55GWH,未来4年复合增长超过25%。


锂电池的生产流程:

电芯制造工艺流程:

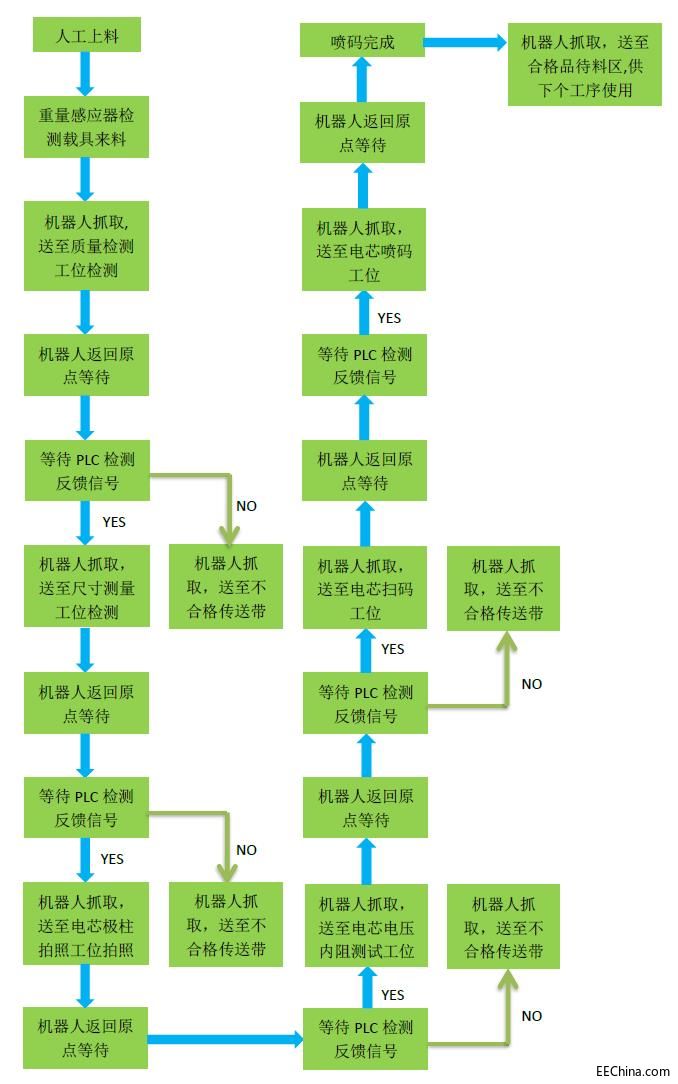
分选流程:

自动分选方式:以测试仪测试出的电池性能参数为依据进行分类;

自动分选设备(模拟图)

人工分选方式:
Ø 以外观为依据对电池片进行分选
Ø 检验方式:全检
Ø 操作方式:人工检查
检测分类标准:


由于动力电池系统的性能和寿命跟系统成组的单个电芯一致性有着直接的联系,这些一致性包括电芯的质量,尺寸,极柱外观,电压和内阻。
电芯质量与电芯容量有着直接的关系,而系统容量会因为某个低容量电芯引起短板效应,即整体容量降低。
电芯尺寸差异会影响电池模块成组,例如电芯厚度差异较大则会影响电池模块厚度方向上的固定,电芯高度一致性差异较大则会影响后续电芯极柱的焊接,高度低的电芯极柱会与电芯连接条产生距离造成焊接失效或产生较大的焊接应力,这个应力具有在后期使用时发生断裂的风险。
电芯极柱外观不良,如破损,裂纹,凹坑,锈蚀,其他杂质都会影响后续电芯焊接工艺,造成焊接不良,导致连接失效,以及造成其他安全隐患。
电芯电压和内阻一致性差,根据电池的短板效应,会造成电池系统整体性能和寿命下降。
综上所述,对电芯的质量、尺寸、极柱外观、电压和内阻控制是必须的,而目前行业里大部分电池系统生产商会对电芯的电压和内阻进行控制,但对电芯质量,尺寸和极柱外观没有做全部控制,而且所有的测量基本靠人工用手测量,测量误差较大,效率低下。
针对以上所述,灵猴机器人自主研发了一套方案(采用机械臂来完成电芯的自动分选),以达到提高电芯各项指标测量的自动化程度,减小人工测量误差以及降低人工生产成本的目的。
方案描述电芯自动分选部分,采用六轴机器人进行搬运分选,四种NG输出,条码不良、厚度不良、重量不良、OCV测试不良,客户标准料盒输出,扫码可查询不良项目。
设备外观如下图所示:

系统框架

工艺流程
系统配置 机械手部件

取料机构

技术指标
精度:
Ø 电阻:±0.5% rdg.±5dgt
Ø 电压:±0.1% rdg.±3dgt
效率:0.3S/cell
案例照片

优势
自动化改进后生产对比表如下:
| 序号 | 生产情况 | 设备/人 | 工序 | 人力比较 | 产品效果系统控制 |
1 | 现有生产情况 | 人工 | 电芯搬运 | 人工 | 稳定性弱,难以保证产品的标准一致 |
人工 | 检测分类 | ||||
2 | 改进后生产情况 | 机器人 | 电芯搬运 | 0 | 系统切换方便,保证产品效果的一致性 |
机器人 | 检测分类 |
动力电池是新能源电动汽车的三大核心部件之一。如今,同行业竞争非常激烈,要想在未来的市场竞争中脱颖而出,传统装配工艺及生产方式必将被淘汰,因为,电池的主要客户整车制造企业永远不变的要求就是更安全、更可靠性和一致性,智能自动化的生产方式已经成为了车企考量供应商产品的重要指标;所以,提升动力电池模组组装的自动化水平非常必要。

- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 制作机器人常用传感器盘点(02-23)
- 复杂路线下机器人的三点三轮寻迹系统(01-17)
- 机器人视觉(Robot Vision)简介(02-23)
- 精密运动控制器LM628的应用设计(06-20)