机器人关键技术及前沿应用设计集锦
用户可以通过手机遥控的方式使机器人进行清扫,方便使用,采用中断服务子程序进行处理;自动避障模块, 机器人在运行过程中能自动避障,同时完场清扫任务:自动区域清扫模块,机器人可以完成对某一区域的自动清扫;电机控制模块,对电机进行控制实现机器人的行 走;这些模块各自封装好,将封装好函数接口留给主函数进行调用。
程序初始化模块主要包括:初始化串口、初始化定时器、开串口中断、开定时器中断、配置独立波特率发生器等。工作过程可以分成两个主要部分:检测控制命令和实现清扫。
对于检测控制命令,要求单片机能够实时响应手机发出的命令,由于是通过蓝牙通讯,则需响应蓝牙通过串口接收到的数据,只需打开串口中断即可。
对于实现清扫,首先要选择清洁模式,再根据不同的清洁的模式,对电机及超声波模块经行相应的控制。
三、项目设计框图
硬件设计框图
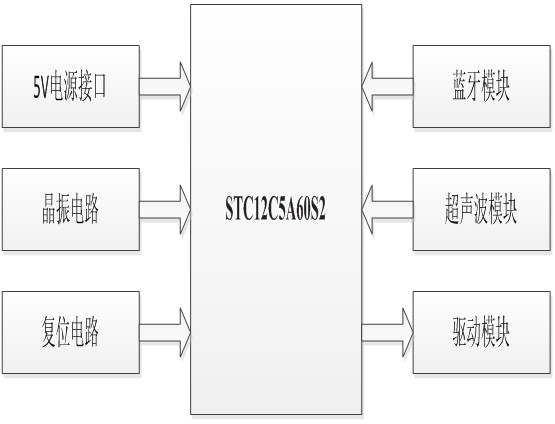
图3-1硬件设计框图
软件设计框图
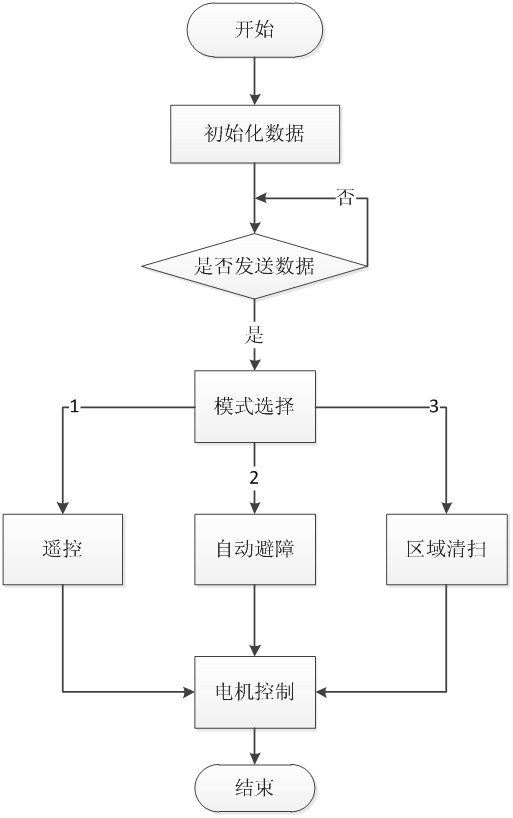
图3-2主程序流程图
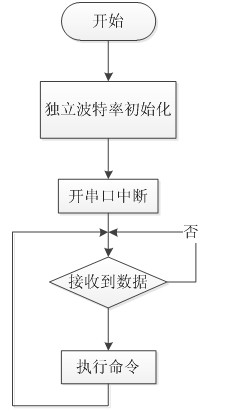
图3-3蓝牙模块流程图
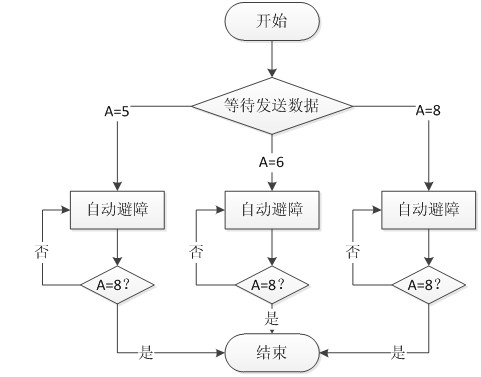
图3-4模式选择流程图
硬件电路图

文章详情:基于SLH89F5162的智能清洁机器人
老人关怀照护系统设计有居家的监控功能及和家人互动功能,透过网路服务,当老人有照顾需求时,可利用手势辨识功能呼叫机器人至身边;当想观看亲 友在脸书(Facebook)上的消息及图片时,可利用脸书动态服务,即时得知亲友最新动态讯息,也可透过网路通话与远方的家人进行视频聊天;同时也可随 时监控,当意外发生时可即时通知家人及医护人员进行处理。
该系统利用主系统芯片将Kinect所感测的骨架追踪、手势辨识及网路摄影的视频通话等感测后存取数值,再利用串列传输(USART)传送数值于主系统芯片,并做出距离等识别模式,进行跟随老人、控制马达与老人互动。
Kinect感测功能襄助 照护机器人创新应用扩大
该系统创新性功能为跟随看护模式--Kinect骨架追踪和超音波定位、骨架判断--跌倒侦测、紧急通知--简讯传送,以及互动功能--手势辨识和网路视频(图1)。

图1 照护机器人理想互动功能
在跟随看护服务部分,该系统利用骨架追踪及超音波定位,当老人移动时,机器人便会跟随至后方进行照护,可随时判定老人是否跌倒,操作起来也十分方便。现 有的跌倒侦测系统大都依赖摄影机或是使用者身上配戴的器材来辨别跌倒,该系统的跌倒侦测只须透过Kinect骨架追踪,即可判定是否跌倒。
至于紧急简讯传送部分,当老人判定为跌倒时,机器人会自动由主系统芯片发布简讯至指定家人手机中,亲人接收到消息后可立即做出反应或视频观看。而脸书动 态及互动视频服务部分,该系统加装脸书动态服务及网路视频,老人即可关心在外子女的图片,并让亲友利用视频互动看见老人在家的状况,能有效拉近老人与家人 的距离。
.跟随看护服务
照护机器人主系统利用芯片与Kinect进行老人互动与 看护服务。智能型看护机器人可透过Kinect跟随于老人后方随时看护,利用Kinect本身的骨架识别,以判别正常状况时的骨架数量与动作。当老人不慎 跌倒时,依骨架瞬间降下或消失为判别,再回传数值讯号给主系统,可即时透过紧急简讯功能送至子女的手机进行通知,家人则可透过网路视频进行查看老人在家中 的状况,以免错过时间就医。
为即时反应与传送数值来跟随与保障老人的安危,看护系统透过主系统芯片提供USART,即可直接利用 USART而不须再以串列周边介面(SPI)进行转换动作。跟随方面,则运用产生脉衝宽度调变(PWM)脉波来控制HB-25马达驱动器来驱动直流马达, 由于控制波形即可正反转,就能在主芯片应用与结合出让机器人前后左右的动作与功能。
该系统还须使用PING超音波距离感应器(图2)来侦测距离,除应用PWM来进行声波传送与接收,也使用通用输入/输出来接收数值距离判断与Kinect骨架等数值。

图2 PING超音波距离感应器
利用芯片使机器人进行追踪,由超音波侦测距离,让主系统判断老人的位置,并命令马达动作,使机器人能进行跟随,可随时跟在老人的身边,注意是否有突发状况发生,挥挥手就能与家人视频通话等功能。
PING超音波距离感应器用于测量与物体间的距离,範围介于3cm?3.3m,容易装置于机器人或自动设备上。超音波感测器利用脉波产生,透过声波喇叭 进行一发一收的动作来得到讯号的时间长短,也就是感测器发送讯号至物体而反射后所经过的时间,在经过运算后即能得到精準的距离。为实现追踪功能,超音波定 位追踪方法利用主系统芯片产生
- 应用于车身传输领域的机器人技术(10-21)
- 机器人技术科普之必知工业机器人分类(10-20)
- 伺服控制智能助力机械手系统功能分析(10-21)
- 实时语音识别系统在家庭监护机器人的实现(11-16)
- 中国机器人现状:核心技术缺失 ,与人共融成突破点(02-28)
- 解析超声波传感器在机器人探测系统中的应用(06-08)