解析超声波传感器在机器人探测系统中的应用
摘要:针对自主移动机器人沿墙导航过程,设计一种收发一体式超声波传感器与步进电机组成的探测系统。介绍此系统的结构和软硬件设计。实验总结超声波波束与目标物的入射角大小对测距稳定性的影响,提出搜寻离墙最近点的方法并应用于移动机器人自身位姿的矫正,且推广应用于移动机器人的环境探测。
移动机器人要获得自主行为,其最重要的任务之一是获取关于环境的知识。这是用不同的传感器测量并从那些测量中提取有意义的信息而实现的。视觉、红外、激光、超声波等传感器都在移动机器人中得到实际应用。超声波传感器以其性价比高、硬件实现简单等优点,在移动机器人感知系统中得到了广泛的应用。但是超声波传感器也存在一定的局限性,主要是因为波束角大、方向性差、测距的不稳定性(在非垂直的反射下)等,因此往往采用多个超声波传感器或采用其他传感器来补偿。为了弥补超声波传感器本身的不足,又能提高其获取环境信息的能力,本文设计由一体式超声波传感器与步进电机组成的探测系统。
1 超声波传感器的探测原理及方法分析
超声波传感器的基本原理是发送(超声)压力波包,并测量该波包发射和回到接收器所占用的时间。
其中,L为目标距超声波传感器的距离;c为超声波波速(为了简化说明,本文以下讨论的测量距离时不考虑波速受温度的影响);t为发射到接收的时间间隔。
由于用超声波测量距离并不是一个点测量。超声波传感器具有一定的扩散特性,发射的超声能量主要集中在主波瓣上,沿着主波轴两侧呈波浪型衰减,左右约30°的扩散角。事实上,式(1)计算度越时间的方式是基于超声波成功、垂直的反射名义下进行的。但对于移动机器人很难保证其自身运动姿态的稳定性,采用超声波传感器固定在移动机器人车身的探测方式,当移动机器人偏离平行墙面时,探测系统往往很难得到实际的距离。另外,超声波这种发散特性在应用于测量障碍物的时候,只能提供目标障碍物的距离信息,而不能提供目标的方向和边界信息。这些缺陷都大大限制了超声波传感器的实际应用和推广。
本文在通过理论的分析和不断地试验的基础上,采用四相步进电机带动单个一体式超声波传感器旋转的方式,组成一个动态的感测系统。
2 一体式超声波传感器与步进电机组成的探测系统
2.1 结构设计
实物照片如图1所示,超声波传感器焊在PCB板上,板子通过钢管树起,钢管另一端和步进电机轴相连,步进电机固定在机器人底盘下方。传感器控制信号与输出信号通过信号线和车身上的控制板相连。另外在超声波传感器的探头前加一泡沫材料制成的圆台形套筒,上口直径为22 mm,下口直径为16 mm,高20 mm。这样发射波的波束角以及反射波被接收的角度都大大受限制。为了机器人自我调整姿态,需要确定其自身的转动方向和基准位置。因而自制一片由直射式红外光电传感器和转盘组成的简易光电编码器。2个直射式红外光电传感器分布如图2中2个I,Ⅱ所示以180°间隔水平安置在机器人小车车身两侧边的中点连接线上。转盘与转臂连接在同心圆上,如图中外圆所示,1,3刻线间相隔27°;2,1刻线相隔180°,其中1刻线与超声波传感器的中心保持在同一水平线上。I单独导通作为基准坐标,I,Ⅱ同时导通用来判断旋转方向,Ⅱ单通作为机器人沿墙回归时的导航基准。
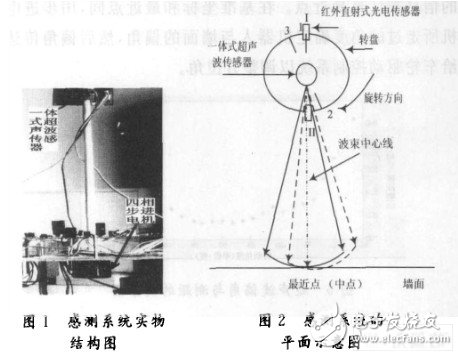
通过步进电机带动一体式超声波传感器转动,以传感器中轴垂直于机器人车体的方向作为其自身姿态调整的坐标基准,步进电机采用4相4拍步距角为1.8°,每转1步,超声波传感器检测1次,将测量值通过串口送上位机。
2.2 探测系统硬件设计
探测系统硬件主要由超声波发生电路、超声波接收电路,步进电机调速模块等组成。如图3所示,系统的核心为单片机89S51,主要完成信号的发射和接收、控制步进电机、并传送数据给机器人上位机进行处理。
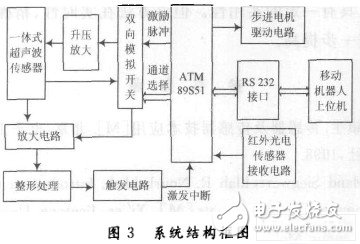
超声波的发射电路采用单片机ATM89S51的P11口输出发射脉冲,由74HC04作为驱动来连接超声波传感器,74HC04是为了增强其输出电流的能力,提高超声波传感器的发射距离。
超声波接收处理电路采用集成电路CX20106。CX20106为红外接收专用集成电路,在此利用CX20106作为超声波传感器接收信号的放大检波装置,亦取得良好的效果。CX20106中前置放大器接收到超声波接收探头的反射信号后,对信号进行放大,电压增益约80 dB。然后将信号送到限幅放大器,使其变为矩形脉冲,再由滤波器进行频率选择,滤除干扰信号,由检波器滤掉载频检出指令信号,再经过整形后,由7脚输出低电平。7脚输出的脉冲下降沿
- 360如何让特斯拉ModelS自动驾驶传感器出错?(07-12)
- 国外牛人DIY超声波导航坦克机器人(图文)(07-09)
- 超声波传感器在自动扶梯行业的应用(06-11)
- 超声波传感器的应用案例(10-22)
- 超声波传感器的原理及应用(08-28)
- 超声波传感器工作原理及主要性能指标(11-16)