应用于车身传输领域的机器人技术
随着汽车市场竞争的加剧,汽车生产企业需要提高生产线的效率和柔性化程度,为此,工业机器人得到推广使用。为了更好地适应多车型、高节拍的连续生产,ABB基于机器人技术开发了一种全新的车身传输系统,在焊装车间得到推广应用。
随着中国改革开放的持续深入以及产业升级的不断加速,中国的汽车产量已跃居全球领先地位,生产企业的数量不断增加,国内汽车保有量持续增长,汽车市场将逐渐趋于饱和。市场竞争加剧,人们对于产品品质、种类等各方面的要求不断提高。这些都要求汽车生产企业尽可能运用现有设备快速生产出多种类型的产品,同时,要求设备生产厂商能提供"柔性、适合多型号产品混合生产"的柔性生产线。此外,对一些生产场地受限制的场合,汽车企业迫切需要实现用尽可能少的生产场地完成产品的生产制造。
为满足柔性制造的需求并保证生产质量,汽车生产企业大量使用了工业机器人作为其主要生产设备,但对于产品的传输方面,多年来一直未有太大的改进,不能很好地适应多车型、高节拍的连续性生产。对此,我们基于机器人技术开发了一种全新的车身传输系统(柔性小车),并在汽车生产厂焊装车间成功地使用。相对于传统的滚床和Shuttle传输方式,柔性小车将其二者的优点合二为一,克服了滚床和Shuttle传输线自身的一些不足。
一、车身传输系统
传统的车身传输系统所采用的主要驱动方式:变频调速与传感器加机械定位销定位的不足之处在于,瞬态响应慢、闭环控制精度一般,无法实现空间多个坐标系的动态拟合计算,为此,我们引入了基于机器人控制技术的伺服控制及定位方式来解决这一问题。
1. 变频传动
常用的变频器只是调节交流异步电动机的速度,可采用开环或闭环控制方式,变频器通过内部的数学模型,将交流电动机的定子磁场转化为可以控制电动机转速和转矩的两个电流的分量,并对每相的输出电流进行检测,采样反馈后构成闭环负反馈的电流环的PID调节。某些变频器(如,ABB、FANUC)还提出了直接转矩控制技术,同时控制电动机的速度和力矩,以提高控制精度和响应特性。
2. 伺服传动
伺服传动基本上都采用闭环方式控制同步伺服电动机,相对于变频方式的电流环、速度环,伺服控制还引入了位置环,伺服控制器有比变频器更精确的控制算法,能够实现非常精确的位置控制。但其价格相对于变频器来说要昂贵。伺服传动的优势在于:瞬态响应快,过载能力强,定位精度高。目前机器人电动机均采用此控制方式。
3. 电动机
伺服电动机的材料、结构和加工工艺远远高于变频器驱动的交流电动机,其瞬态响应远优于变频电动机。当驱动器输出变化很快的电流、电压和频率时,伺服电动机能快速做出响应,响应特性和抗过载能力远高于变频器驱动的交流电动机。例如,伺服电动机一般的加速时间为20 ms,能承受3倍的过载,而变频电动机的加速时间则要长很多,普遍在几百毫秒或以上,过载能力也仅有1~1.5倍,但因其价格低廉,在常规传动领域一直是主流的方式。
4. 工业机器人技术
它是集运动学、动力控制、位置控制及智能传感等多学科为一体的高新技术,也是我国近年来发展的重点。工业机器人采用伺服控制作为其传动控制方式,以实现其优异的性能及精度。
柔性小车是新近开发并投入使用的一种基于机器人技术的设备,它和机器人一样具有很高的定位精度和很好的瞬态响应。作为最基本也是最常用的方式是将其作为传输装置,取代原有的滚床和Shuttle传输线,它和滚床一样能够在某个工位发生故障时继续运行后续工位,避免全线停产的事故。同时,它也具有 Shuttle传输线快速高效定位准确的特点,相对于Shuttle传输线,柔性小车具有很高的柔性,能适应多种车型的传输。我们使用机器人的标准伺服控制系统和软件同时控制机器人与传输装置(柔性小车)的方法,实现了高性能与低成本的融合。
在机器人技术中,有多种多样的运动模型供我们选用,对于常见的没有旋转轴的柔性车身传输,我们采用了如图1所示的运动模型,该运动模型的特点是计算简单,能满足一般的应用。加入了第3个平移轴后的运动学模型如图2所示。对于加入了旋转轴的小车我们采用如图3所示的运动模型。
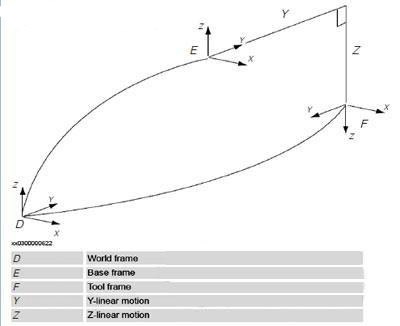
图1 常见的柔性车身传输运动模型
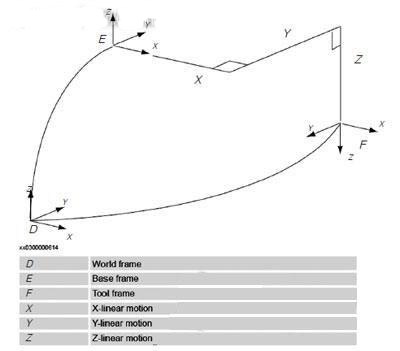
图2 加入第3个平移轴后的运动学模型
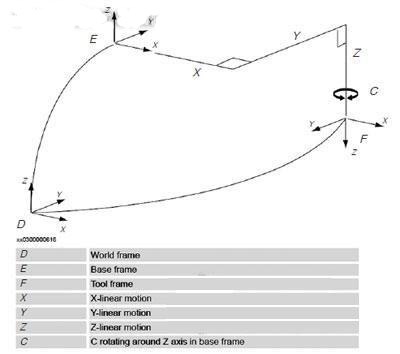
图3 加入旋转轴的运动模型
标准的机器人控制系统所提供的成熟的运动学模型有助于快速方便地将传输装置(柔性小车)的运动与机器人的运动予以同步联动,实现更快、更准的运动控制。作为该技术的标准化机器人应用常
- 机器人关键技术及前沿应用设计集锦(10-24)
- 机器人技术科普之必知工业机器人分类(10-20)
- 伺服控制智能助力机械手系统功能分析(10-21)
- 实时语音识别系统在家庭监护机器人的实现(11-16)
- 中国机器人现状:核心技术缺失 ,与人共融成突破点(02-28)
- 解析超声波传感器在机器人探测系统中的应用(06-08)