机器人关键技术及前沿应用设计集锦
电路,片内时钟振荡器等。
在开发过程中使用开发板,以方便程序的调试和整机的测试,待系统调试完成后,将单片机从开发板上取下,安装在机器人系统板的单片机座中,由于设计中的机 器人需要完成的任务比较简单,因此只在机器人系统板的单片机系统中保留了晶振和复位电路,取消了JTAG编程口等冗余电路。
3.2 传感器模块
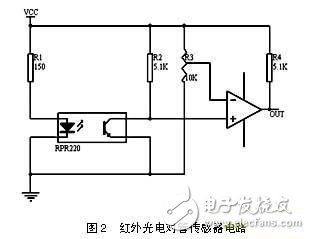
光电传感器的工作原理是传感器红外发射管发射出红外光,接收管根据反射回来的红外光强度大小来计数的,故被检测的部件或物体表面必须有黑白相间的部位用 于吸收和反射红外光,这样接收管才能处于有效的截止和饱和区以达到计数的目的。传感器的检测与调节电路如图2所示。图中的R3用于调节比较器的门限电压, 经示波器观察,输出波形相当规则,可以直接供单片机查询使用,而且经验证给此电路供电的电池压降较小。红外光电传感器通过主板P8、P9、P10接口连接 到AT89S52的P0.5、P0.6和P0.7端口。其中P0.5 = 0,表示前方有障碍;P0.6 = 0 ,表示左方有障碍; P0.7=0,表示右方有障碍。
3.3 直流电机驱动电路与电源模块
直流电机通过主板的P5接口连接到主板的驱动模块上。本文采用L298作为电机的驱动芯片,L298的5、7、10、12四个引脚连接到单片机上,通过 对单片机的编程就可以实现两组直流电机的正反转等功能。由于单片机的电压在4.8V左右,故采用VFM升压型电源芯片,为单片机及外围电路提供5V左右的 电压。
4 软件设计模块
4.1 软件开发环境与搜索算法
本文采用Keil U Version2 作为系统的开发环境,在程序设计中采用C语言和汇编语言混合编程。在软件算法上,考虑到深度优先搜索算法的时空效率和迷宫地形的复杂程度成正比,即迷宫越 复杂,搜索出口的时间就越长。本文采用了一种称为左手(或右手)法则的迷宫路径搜索策略,即在迷宫中一直沿着左侧(或右侧)的墙寻找,就可以找到出口。
相对于深度优先搜索法,左手(或右手)法则的空间占用与迷宫复杂程度无关,机器人搜索路径的选择只与当前结点有关,不需要回溯。同时,硬件的制造精度要求不高,不需要精确的控制机器人的移动距离和移动方向,方便了驱动设计。为便于算法的实现,本文设定了如下约束条件:
1.在算法中不管迷宫地形有多么复杂,均由直线、死路、丁字形、十字形、转角形和终点七个基本地形构成。
2.按分岔的多少将分岔口分为二岔口和三岔口(一般没有四岔口),而将分岔口前面的岔路按从右到左的顺序分别称为第一岔路、第二岔路、第三岔路(十字型 才有)。二岔路有三种不同的形式,第一种是前进的路线右边出现一条岔路(右边的岔路称为第一岔路、前方称为第二岔路);第二种是在前进的路线左边出现一条 岔路(前方称为第一岔路、左边的岔路称为第二岔路);第三种是丁字路口(右边的岔路称为第一岔路、左边的岔路称为第二岔路)。对于这三种情况,算法对应的 程序由主程序、走直线子程序、左转子程序、右转子程序和校正子程序组成。主程序起到导向和决策的功能,决定机器人什么时候该做什么。机器人的其他功能通过 调用具体的子程序来实现。
4.2 算法流程图描述
本文所采用的迷宫搜索算法流程 如图3所示。接通电机和传感器电源后,单片机在程序的控制下,根据传感器检测到的值,决定电机的正转和反转。当 P0.7=1时,表示左方没有障碍物,依据"右手"遍历算法,机器人将调用右转子程序;当P0.7=0并且P0.5=0时,机器人将调用左转子程序;否则 机器人直线前进,如此反复检测并调整机器人的动作,直至机器人走出迷宫为止。

5 结论及其创新点
本文对基于AT89S52的嵌入式智能寻迹机器人的硬件架构进行了探讨,将左手(或右手)法则用于寻迹机器人行走路线搜索,重点讨论了基于 AT89S52的光电传感器模块、直流电机驱动模块、电源模块等的电路实现技术,经过反复测试,机器人能够在软件的控制下,无需任何外界力量就可以智能地 完成从迷宫入口走到出口的寻迹任务。创新点在于通过光电传感器自动感知障碍物,并利用软件控制机器人左/右转以及直线行走,对复杂路径探测是一种尝试,特 别适合人无法到达的环境路径探测,系统成本低,可靠性高,反应灵敏,对智能玩具的设计与开发也具有一定的参考价值。
一、项目设计背景及概述
清洁机器人是服务机器人的一种,所谓服务机器人是指自主 或半自主的、从事非生产活动、能完成有益于人类健康的服务工作的机器人。家庭清洁机器人集机械、电子、传感器、计算机、控制、机器入技术、人工智能等诸多 学科
- 应用于车身传输领域的机器人技术(10-21)
- 机器人技术科普之必知工业机器人分类(10-20)
- 伺服控制智能助力机械手系统功能分析(10-21)
- 实时语音识别系统在家庭监护机器人的实现(11-16)
- 中国机器人现状:核心技术缺失 ,与人共融成突破点(02-28)
- 解析超声波传感器在机器人探测系统中的应用(06-08)