机器人关键技术及前沿应用设计集锦
内伺服放大器控制板坏:检查伺服放大器LED"D7"上方的2个DC链路电压检测螺丝,确认DC链路电压。如果检测到的DC链路电压高于50V,就 可判断伺服放大器控制板处于异常状态。实际检测发现DC链路电压低于50V,所以初步判断伺服放大器控制板处于正常状态。 进一步对伺服放大器控制板上P5V、P3.3V、SVEMG、OPEN的LED颜色进行观察,确认电源电压输出正常,没有外部紧急停止信号输入,与机器人 主板通讯也正常,排除伺服放大器控制板损坏。
3) 线路损坏:对机器人控制器与机器人本体的外部电缆连线RM1、RP1进行检查,RM1为机器人伺服电机电源、抱闸控制线,RP1为机器人伺服电机编码器信 号以及控制电源线路、末端执行器线路、编码器上数据存储的电池线路等线路。拔掉插头RP1,对端子5、6、18 用万用表测量+5V、+24V控制电源均正常。接下来对编码器上数据存储的电池线路进行检查。机器人每个轴的伺服电机脉冲编码器控制端由1-10个端子组 成,端子8、9、10为+5V电源,端子4、7为数据保持电池电源,端子5、6为反馈信号,端子3为接地,端子1、2空。拔掉M1电机的脉冲控制插头 M1P,万用表测量端子4、7,电压为0,同样的方法检查M2~M7电机全部为0,由此可以判断编码器上数据存储的电池线路损坏。顺着线路,发现正负电源 双绞线的一端插头长期埋在积水中,线路已腐蚀严重。
2、故障处理:更换线路后复位,对机器人进行全轴零点复归"ZERO POSITION MASTER",导入备份程序后恢复正常,故障排除。
结论
做为日系机器人的主要品牌之一,其在控制原理上与其它品牌机器人大致相同,但其控制部分组成结构有着自己的风格,体现亚洲人的使用习惯,比较适合国内使 用。我国焊接机器人技术的研究应用虽然较晚,但借鉴于国外的成熟技术,得到了迅速的发展。09年我公司与哈工大合作开发的奇哈机器人诞生,似乎看到了企业 与科研合作的力量,觉得当企业进入的时候,特别是这种应用型企业开始参与设备的研究的时候,门就慢慢打开了。但焊接机器人是个机电一体化的高技术产品,单 靠企业的自身能力是不够的,需要政府对机器人生产企业及使用国产机器人系统的企业给予一定的政策和资金支持,加速我国国产机器人的发展。
1 引言
在信息技术的飞速发展,计算机,通讯、消费电子三种技术合一的后PC的 时代,虽然计算机和网络已经全面渗透到日常生活的每一个角落,但各种各样的新型嵌入式接入设备已经成为当前的主流产品。任何一个普通人都可能拥有几十种嵌 入式技术的电子产品,小到手表、手机、mp3播放器、PDA等微型数字化产品,大到智能家电、网络家电、车载电子设备等都离不开嵌入式技术。作为嵌入式技 术的一个重要的研究分支——机器人技术,目前在国内外研究的如火如荼,各种各样的工业机器人和服务机器人已经开始应用到人们的生产和生活当中,使用机器人 的优势已经被人们广泛认可,并正在成为我们日常工作和生活的一部分。本文利用AT89S52设计了一种嵌入式智能寻迹机器人,在传感器、电机驱动和软件的 控制下,能够智能地完成迷宫行走路线探测的任务,与传统的遥控玩具车相比,具有一定的独立性和智能性,是未来智能玩具车的一种雏形。
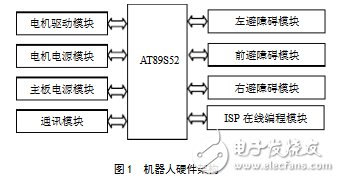
2 系统的硬件架构和工作原理
嵌入式智能寻迹机器人的硬件架构如图1。以单片机AT89S52为核心,外围由电机驱动模块、电机电源模块、主板电源模块、通讯模块、回避障碍模块以及 在线编程模块等组成。红外光电传感器通过主板的P8、P9、P10接口连接到 AT89S52的P0.5、P0.6和P0.7端口,其中P0.5 = 0,表示前方有障碍;P0.6 = 0 ,表示左方有障碍; P0.7=0,表示右方有障碍。左右电机通过主板的P5接口,连接到主板电机驱动模块。
上电后,通过传感器采集迷宫挡板的信号来控制端口P0的低五位,实现左右电机的正/反转,从而使机器人做左转、右转、直线前进等动作,完成在迷宫中从入口到出口的行进过程。
3 系统接口电路设计
3.1 微控制器模块
AT89S52是一个低功耗、高性能CMOS 8位单片机,片内有8KB ISP的可反复擦写1000次的Flash只读程序存储器,器件采用高密度、非易失性存储技术制造,兼容标准MCS-51指令系统及80C51引脚结构, 芯片内集成了通用8位中央处理器和ISP Flash存储单元,可为许多嵌入式控制应用系统提供高性价比的解决方案。
AT89S52有40个引脚,片内有8KB Flash程序存储器,256B的RAM,32个外部双向输入/输出口,5个中断优先级,2层中断嵌套,2个16位可编程定时计数器,2个全双工串行通信口,看门狗(WDT)
- 应用于车身传输领域的机器人技术(10-21)
- 机器人技术科普之必知工业机器人分类(10-20)
- 伺服控制智能助力机械手系统功能分析(10-21)
- 实时语音识别系统在家庭监护机器人的实现(11-16)
- 中国机器人现状:核心技术缺失 ,与人共融成突破点(02-28)
- 解析超声波传感器在机器人探测系统中的应用(06-08)