机器人关键技术及前沿应用设计集锦
性的聚氨酯纤维(中国称:氨 纶) 中以螺旋状嵌入可通电的导线,使得电线可以伸缩,且不易出现松弛。与容易松弛的以往电线相比,自由自在的变形将成为可能。旭化成力争将这种电线应用于实现 复杂动作的拟人机器人和穿戴型辅助机器人。
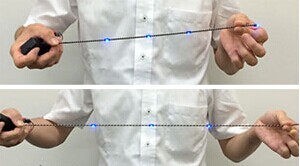
以树脂材料作为保护的一般电线在用于机器人时,在手腕做弯曲动作等的情形下,容易形成松弛或缠绕。而旭化成开发的这种伸缩性电线将可以依照其实施的拟人动作合理布线。
机器人可自行组队技术
相信对于有密集恐惧症的人来说,看到1000只排得密密麻麻的小机器人在桌面上一起移动绝对不会感到好受。不过这仍无法阻碍哈佛大学的工程师们打造这样 的系统。据悉,研究团队使用了1000只组装简易的小型机器人,每个造价20美元。 据介绍,每组装一个这样的机器人需要5分钟的时间,也就是,他们花费了83多个小时完成了这项艰巨的任务。

造房子机器人:或成为未来主流
一个被称为Minibuilders的全新3D打印建筑机器人套件,可以像建筑工人那样3D打印出一间房屋,其快速、低价、安全让建筑机器人将有可能成为下一代强大的建筑必备工具。
其运作方式基本上和同类型的无人建筑机器人一样,逐层浇筑流体建筑材料。但是它最大的不同,就是可以打印的建筑体积更大,而且设计方法也与众不同。
这套系统的核心是一个庞大的主部件,有两个装有液化合成大理石的大型圆筒,大理石经独特的配方制成。气胎注射筒会通过长长的管子推动材料,那些管子将被 安置在一个建筑工地上,与三个敏捷的专业附属机器人协同工作。有些研究人员会觉得自己就像是一个建筑师,把自己的建筑构想通过一个巨大的独立机器变成现 实,而Minibuilders的团队扮演角色就像是一个"包工头",在建设过程中"招募"各相关领域里的建筑专业资源。
更多机器人技术资料,电路图及DIY设计,可参见本期Designs of week——当中国制造遇上机器人技术,设计思维请跟上!

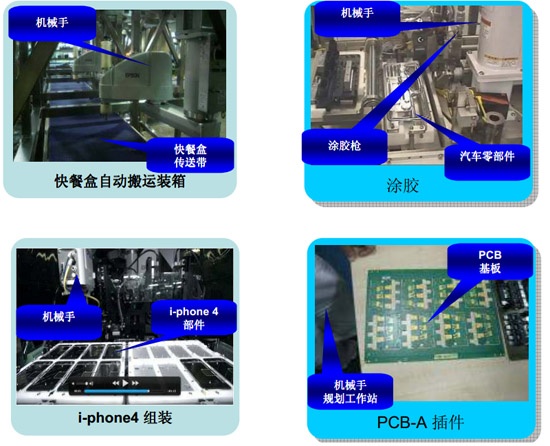
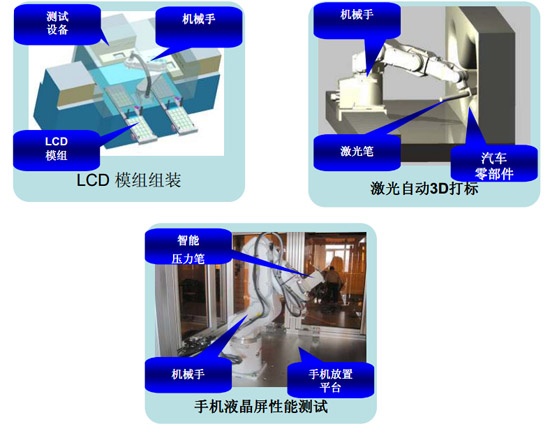
爱普生机械手简介
精密组装机器人: 在高速运动状态下具备低残留震动及高精度,应答时间短,动作灵敏 应答时间短,动作灵敏,在3维状态下仍然保证轨迹平滑精密。
图象机器人: 通过机械手及摄像装置的组合可以轻松地满足多品种生产的需求, 满足多品种生产的需求。
标准化解决方案简述

给用户的可行性分析方案样例(以食品包装方案为例)
系统整体描述
• 用户需求:
– 自动成品包装,100~120袋/分钟
– 包装箱最大尺寸:535*380*287(综合)
– 汤圆包装袋最大重量:600克/袋*
– 装箱方式:顶部装入,每层4袋
– 系统可以实现人机对话,产品更换时,系统自动切换搬运方式。
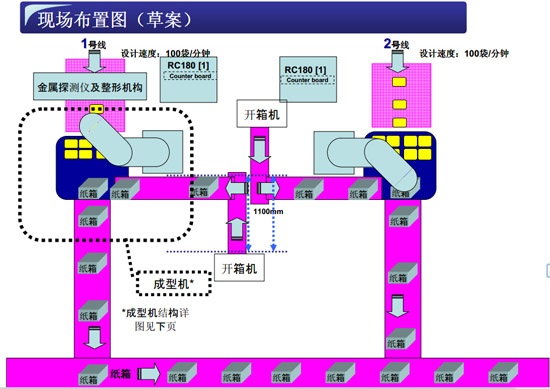
• EPSON 设计方案简述:
– 系统分为3个主要部分:开箱机、成型机、机器人搬运系统。
– 开箱机负责将包装箱整形输送到位。
– 成型机负责将流水线包装袋分隔并固定在回转台上。
– 机器人搬运系统负责将包装袋搬运装入包装箱(一次4袋)。
– 其他部分包括必要的输送线、电控、人机界面、控制软件等附件。
整形和成型机构

机器人搬运系统特性
• 机器人采用水平多关节机器人(SCARA),该机器人的特点是:
– 高速、高稳定性、环境适应性强(对现场环境无特殊要求)
– 机械手刚性参数较高,遇工人误操作不易损坏。
– 维护成本低(零备件寿命长,价格较便宜)
– 占地面积小,适合紧凑空间的生产。
– 最大载重量为6KG,可适应未来产线汤圆包装袋容量重量变化,无需重新
设计系统。甚至重新购买机器人。
– 运动范围大:垂直方向行程330mm,大大降低了未来产品包装箱变化时
对系统改造的难度和费用。
– 运动范围大:水平方向有效作业范围最长可达到650mm半径的扇形区域,大大降低了未来产品包装箱和产线位置调整时对系统改造的难度和费用。
• 控制器采用EPSON独有的小型紧凑型控制器,该控制器的特点是:
– 紧凑型设计,不占过多空间。
– 通讯接口丰富,可取代复杂的PLC系统,提高系统的稳定性。
– 扩展性强,未来系统再升级和改造时预留
主要技术指标
1. 机器人搬运系统工作频率:
• 取放100袋/分钟
• 设计余量20%(即,可达到最大120袋/分钟)
• 搬运距离330mm
• 搬运高度:300mm
• 最大搬运重量6KG(含真空
- 应用于车身传输领域的机器人技术(10-21)
- 机器人技术科普之必知工业机器人分类(10-20)
- 伺服控制智能助力机械手系统功能分析(10-21)
- 实时语音识别系统在家庭监护机器人的实现(11-16)
- 中国机器人现状:核心技术缺失 ,与人共融成突破点(02-28)
- 解析超声波传感器在机器人探测系统中的应用(06-08)