机器人关键技术及前沿应用设计集锦
• 最大搬运重量6KG(含真空棘爪)
2. 机器人搬运系统抓取成功率
• 10‰(千分数)
• 机器人系统可设计掉袋补偿动作
• 输送线上设计掉袋回收路径
3. 开箱机工作频率:(24箱/分钟)
• 开箱机的工作频率可供2~3条线同时使用
4. 成型机工作频率(30组/分钟)
• 工作频率匹配机器人搬运系统和上工序频率。
焊接是工业生产中非常重要的加工方式,同时由于焊接烟尘、弧光和金属飞溅的存在,焊接的工作环境非常恶劣,随着人工成本的逐步提升,以及人们对焊接质量的精益求精,焊接机器人得到了越来越广泛的应用。
机器人在焊装生产线中运用的特点
焊接机器人在高质、高效的焊接生产中发挥了极其重要的作用,其主要特点如下:
1.性能稳定、焊接质量稳定,保证其均一性
焊接参数如焊接电流、电压、焊接速度及焊接干伸长度等对焊接结果起决定性作用。人工焊接时,焊接速度、干伸长等都是变化的,很难做到质量的均一性;采用 机器人焊接,每条焊缝的焊接参数都是恒定的,焊缝质量受人为因素影响较小,降低了对工人操作技术的要求,焊接质量非常稳定。
2.改善了工人的劳动条件
采用机器人焊接后,工人只需要装卸工件,远离了焊接弧光、烟雾和飞溅等;点焊时,工人不再需要搬运笨重的手工焊钳,从大强度的体力劳动中解脱出来。
3.提高劳动生产率
机器人可一天24h连续生产,随着高速、高效焊接技术的应用,使用机器人焊接,效率提高地更加明显。
4.产品周期明确,容易控制产品产量
机器人的生产节拍是固定的,因此安排生产计划非常明确。
5.可缩短产品改型换代的周期,降低相应的设备投资
可实现小批量产品的焊接自动化。机器人与专机的最大区别就是它可以通过修改程序以适应不同工件的生产。
一、FANUC控制系统概述
FANUC机器人主要应用在奇瑞公司乘用车一厂和乘用车三厂的焊装车间,是奇瑞最早引进的焊接机器人,也是奇瑞公司最先用到具有附加轴的焊接机器人。
其控制系统采用32位CPU控制,以提高机器人运动插补运算和坐标变换的运算速度。采用64位数字伺服驱动单元,同步控制6轴运动,运动精度大大提高, 最多可控制到21轴,进一步改善了机器人动态特性。支持离线编程技术,技术人员可通过离线编程软件设置参数,优化机器人运动程序。控制器内部结构相对集成 化,这种集成方式具有结构简单、整机价格便宜、易维护保养等特点。
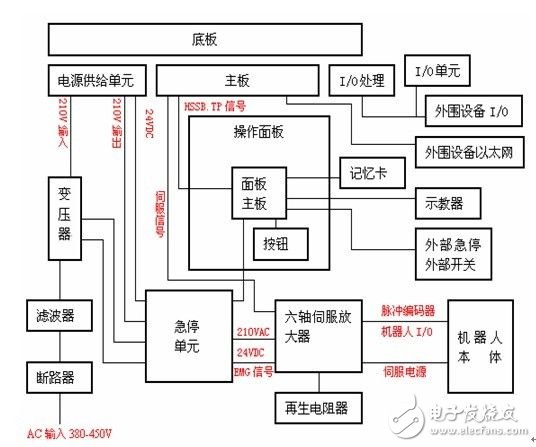
图1 控制原理图
二、FANUC控制系统内部结构分析
控制器是机器人的核心部分,实现对机器人的动作操作、信号通讯、状态监控等功能。下面以FANUC—F-200iB为例,对其控制系统内部结构和各部分的功能进行分析:
1)电源供给单元
变压器向电源分配单元输入230V交流电,通过该单元的系统电源分配功能对控制箱内部各工作板卡输出210V交流电及±15V、+24V直流电。
2)安全保护回路
由变压器直接向急停单元供电,并接入内部各控制板卡形成保护回路,对整个系统进行电路保护。
3)伺服放大器
不仅提供伺服电机驱动和抱闸电源,并且与绝对值编码器实现实时数据转换,与主控机间采用光纤传输数据,进行实时信号循环反馈。
4)输入/输出模块
标配为ModuleA/B,另外也可通过在扩展槽安装Profibus板、过程控制板与PLC及外围设备进行通讯。
5)主控单元
整个控制系统的中枢部分,包括主板、CPU、FROM/SRAM组件及伺服卡,负责控制器内部及外围设备的信号处理和交换。
6)急停电路板
用来对紧急停止系统、伺服放大器的电磁接触器以及预备充电进行控制。
7)示教器
包括机器人编程在内的所有操作都能由该设备完成,控制器状态和数据都显示在示教盒的显示器上。
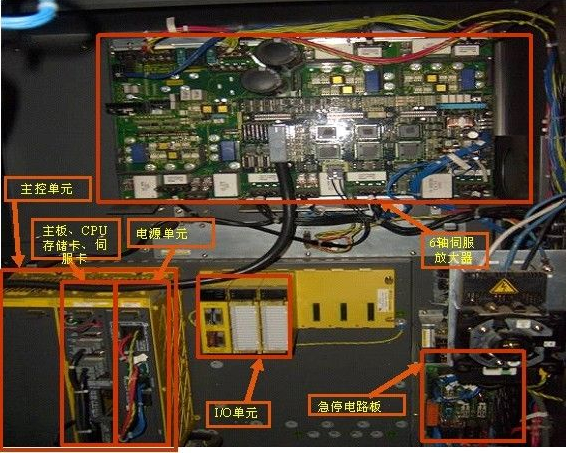
图2 控制内部结构
三、 故障案例分析
机器人控制器断电检修后,对控制器送电,机器人报伺服故障,故障代码为SERVO-062。对此故障进行复位:按MENUS→SYSTEM→F1,[TYPE]→找 master/cal→F3,RES_PCA →F4,YES 后,机器人仍然报伺服故障。
1、故障分析和检查:故障代码SERVO-062的解释为SERVO2 BZAL alarm(Group:%d Axis:%d),故障可能原因分析如下:
1) 机器人编码器上数据存储的电池无电或者已经损坏:拆卸编码器脉冲数据存储的电池安装盒,电池盒内装有4节普通1.5V的1号干电池,对每节电池的电压进行 测量,均在1.4V以下,电池电压明显偏低,于是更换新电池,再次对故障进行复位,机器人仍然报SERVO-062故障。
2) 控制器
- 应用于车身传输领域的机器人技术(10-21)
- 机器人技术科普之必知工业机器人分类(10-20)
- 伺服控制智能助力机械手系统功能分析(10-21)
- 实时语音识别系统在家庭监护机器人的实现(11-16)
- 中国机器人现状:核心技术缺失 ,与人共融成突破点(02-28)
- 解析超声波传感器在机器人探测系统中的应用(06-08)