机器人关键技术及前沿应用设计集锦
为一体,能够自动进行房间地面的家庭卫生服务。在一些发达国家的很多公共场合已经开始使用清洁机器人,随着清洁机器人性价比的提高,清洁机器人进入家 庭成为可能。
二、项目设计原理
2.1、原理概述
清洁机器人需要完成的任务是能够在房间中自动清洁地面。工作时,利用各种传感器测得环境信息,并做出决策,实现边行走边打扫,完成预定的任务。典型的清洁机器人主要由以下几个模块组成:
(1)信息采集模块
(2)决策模块
(3)运动控制模块
(4)清扫模块
这四个部分构成了完整的清洁机器人系统,如图2-1所示。信息采集模块返回当前清洁机器人的位置信息,如是否碰到障碍物、是否遇到楼梯等,然后把这些信 息送给决策模块进行决策,控制运动控制模块,使机器人转弯或者后退等,在机器人运动的同时让清扫模块进行清扫,完成打扫地面的任务。
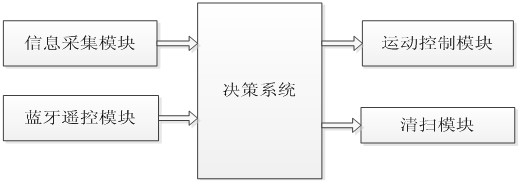
图2-1清洁机器人系统典型组成示意图
2.2、硬件设计原理
机械结构设计
机器人本体的良好设计是实现其他各功能模块的基础。本文设计的清洁机器人采用三轮机构的车体,两个动力轮,一个万向轮,具有运动灵活,控制简单的优点。
机器人在地面上移动的方式通常有三种:轮式、履带式和步行式。步行移动方式模仿人类或动物的行走机理,用腿脚走路,对环境适应性好,智能程度也相对较 高,但步行移动方式在机构和控制上比较复杂:履带移动方式将环状循环轨道履带卷绕在若干滚轮外,使车轮不直接与地面接触,履带式的的优点是着地面积比车轮 式大,所以着地压强小,适于爬坡或者不平的地面;轮式移动方式是最常见的一种地面行进方式,其特点是:能高速稳定的移动,能量利用效率高,机构和控制简 单,但不能爬坡。本设计中清洁机器人只需在室内打扫,工作环境较好,所以采用轮式移动方式。
超声波传感器需要安装在底盘上,且需要安装在合适的位置并牢固可靠。本设计中将超声波模块直插在固定的电路板上,进而固定在底盘上。机器人行进时,主要是对要前行的路探测是否有障碍物,因此将超声波模块安装在车身的最前端。
本系统选用双轴HC02-48强磁电机,电机运行稳定,无抖动。扭力强劲130强磁直流减速电机,扭力为普通电机的2至5倍,电压3-9V,变速箱1:48比速,小车最佳比速,速度与力量完美组合。
清扫机器人的吸尘技术有两类:真空吸尘器和气流滤尘器。真空吸尘器是由高速旋转的风扇在机体内形成真空从而产生强大的气流,将尘埃和脏物通过吸口吸入机 体内的滤尘袋内。气流滤尘器是一个全封闭系统,既无外部气体吸入,也无机内气体排除,其原理是利用附壁效应去形成低压涡流气体,最后将沉渣截留于吸尘器内 的涡流腔内。
硬件电路设计
根据清洁机器人功能要求,清洁机器人硬件系统包括单片机最小系统、电源模块、电机驱动模块、超声波模块、蓝牙模块。
本系统采用SLH89F5162作为核心控制芯片。采用了多种防破解技术。SLH89F5162单片机是一款功能比较强大的单片机,它拥有两个全双工串 行通信接口,串口1的功能及操作与传统51单片机串行口相同:特殊的是SLH89F5162单片机内部有一个独立波特率发生器,串口1可以使用定时器1作 为波特率发生器,也可以使用独立波特率发生器作为波特率发生器;而串口2只能使用独立波特率发生器作为波特率发生器。SLH89F5162是高速/低功耗 /超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。内部集成3路PWM,8路高速10位A/D转换,针对电机控 制,强干扰场合。SLH89F5162单片机为整个控制系统核心,考虑各模块的功能需求以及单片机各个I/O口的特性后。
硬件系统由以下几个模块构成:电源部分,负责提供稳定的5V电源;晶振电路,为系统提供时钟;复位电路,按键后对系统进行复位:蓝牙模块,接收手机发送的控制信号;超声波模块,进行实时测距以躲避障碍物;驱动模块,驱动电机工作,实现机器人的行走。
软件设计原理
本章主要进行了系统软件设计,完成了底层软件的编写;同时,研究了清洁机器人路径规划算法,实现了三种清扫模式的选择;进一步,研究了智能手机遥控在清洁机器人中的应用。
清洁机器人在实现自动清洁任务时,需要完成如下几个任务:(1)接收手机发出的控制命令;(2)手机控制行走;(3)自动避障;(4)控制驱动轮行走; (5)自动清洁区域。其中接收手机发出的控制命令,对实时性要求比较高,需要中断程序处理,其他传感器信息采用查询方式进行处理。
本系 统将软件分成以下几个模块进行实现:手机遥控模块,
- 应用于车身传输领域的机器人技术(10-21)
- 机器人技术科普之必知工业机器人分类(10-20)
- 伺服控制智能助力机械手系统功能分析(10-21)
- 实时语音识别系统在家庭监护机器人的实现(11-16)
- 中国机器人现状:核心技术缺失 ,与人共融成突破点(02-28)
- 解析超声波传感器在机器人探测系统中的应用(06-08)