自动驾驶不可或缺的传感器--毫米波雷达
雷达对于速度并不敏感,而毫米波雷达则对速度非常敏感,可以直接获得目标的速度,因为毫米波雷达会有很明显的多普勒效应,通过检测其多普勒频移可将目标的速度提取出来。
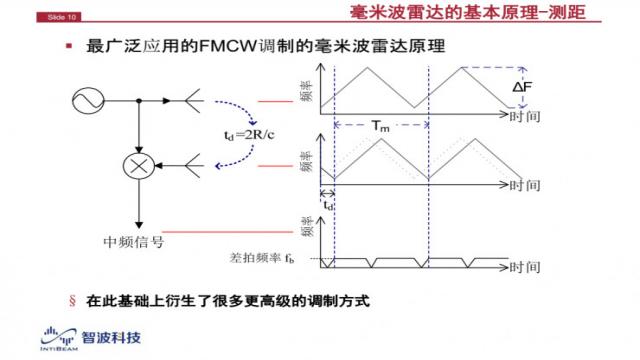
毫米波雷达最基本的探测技术是使用FMCW连续线性调频波去探测前方物体的距离,毫米波雷达发射的是连续波,在后端处理上要比激光雷达的运算量大。
其原理在于:
振荡器会产生一个频率随时间逐渐增加的信号,这个信号遇到障碍物之后,会反弹回来,其时延是2倍距离/光速。返回来的波形和发出的波形之间有个频率差,这个频率差和时延是呈线性关系的:物体越远,返回的波收到的时间就越晚,那么它跟入射波的频率差值就越大。
将这两个频率做一个减法,就可以得到二者频率的差频(差拍频率),通过判断差拍频率的高低就可以判断障碍物的距离。
此外,为了探测目标的速度,也有更为高级的调频技术来实现,主要以多普勒频移原理为基础。
角度的探测是通过多个接收天线接收到信号的时延来实现。举个简单的例子,假设有2根天线,接收从某个方向发出的电磁波,这个电磁波到达2根天线的时间是有差值的,或者说是相位差,通过这个相位差可以评估信号的角度。
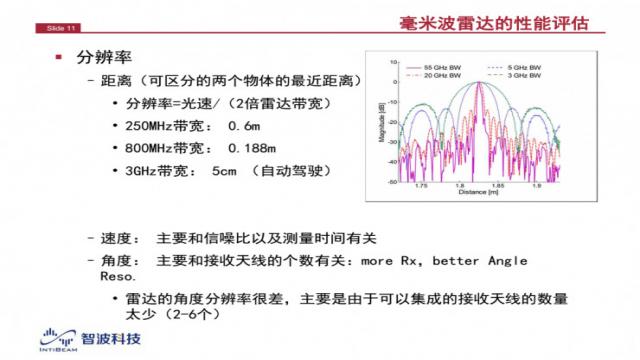
这里要引入一个非常重要的概念——毫米波雷达的分辨率。其定义是"雷达可以区分的两个物体的最近的距离",比如,两个物体靠得很近,那么雷达可能会将其列为一个物体,如果分得开一些,雷达会看到两个物体。那么究竟离多远雷达能区分两个物体间的距离,这个就叫做雷达的分辨率。
分辨率的计算公式也很简单,就是光速/2倍的雷达带宽,所以对于24GHz和77GHz来说,可以直接算出其分辨率。前者是0.6m,后者则约为20cm。而3GHz带宽的毫米波雷达的分辨率可以做到5cm,非常适合自动驾驶的应用。
此外,在关键性的天线技术方面,毫米波雷达有两种,一种是基于透镜,另一种是用PCB印刷。基于透镜的天线开发灵活度较小,因为最后会聚焦到一个很小的区域,这个区域不大容易安排灵活的设计。
四、未来
总体来说,毫米波雷达成本下降的速度还是比较快的,因为它是硅基的芯片,没有特别昂贵和复杂的工艺。而激光雷达则在光的收发器和组装工艺要求高,成本比较难降下来。
激光雷达目前还有一个非常重要的技术是固态激光雷达,它实际上与传统雷达、毫米波雷达是一脉相承的,固态激光雷达实质上就是调整每个发射和接收单元的相位,毫米波雷达也是同样的原理,只不过毫米波雷达是对电磁波进行操作,器件的实现难度要比对光的频段上进行相位的改变的难度低很多。
而对于毫米波雷达的市场前景。一辆车上会搭载3-8颗毫米波雷达,目前奔驰的高端车上也已经安装了7颗。未来10年,车载毫米波雷达的市场规模将不容小觑。
从政策上来讲,各个国家都在推进汽车的AEB功能,其中日本和北美已经在推行,中国也将在2018年推行到商用车领域。
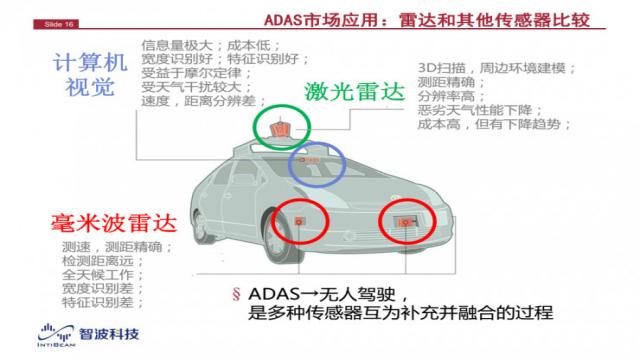
毫米波雷达在ADAS领域是很难被取代的传感器,虽然有一些缺点,但是是唯一的全天候工作的传感器。其测速、测距的精度要远高于视觉,与激光雷达相比,其测速精度会高一些。穿透力会更好。但是整体来讲,这并不冲突,因为未来会走向融合的趋势,特别是针对无人驾驶,毋庸置疑三大传感器会相互融合。
- 自动驾驶技术的量产化挑战及应对(10-08)
- 2016 CES看点汇总:智能家居/自动驾驶/可穿戴/VR一个不少(01-07)
- 特斯拉被调查,无人驾驶车出车祸(07-01)
- 自动驾驶标准离大一统还会有多远(07-18)
- 谷歌:自动驾驶汽车才是高端芯片的市场(09-02)
- LTE在车联网和自动驾驶的应用中有哪些机会?(10-28)