一文看懂最新机器人离线编程软件
时间:04-06
来源:互联网
点击:
今天小萌无意间看到了数控老武写的一篇关于国内外离线编程软件对比的文章,看了之后感觉有些方面写的不错,比如大家有所耳闻的离线编程软件都做了介绍,而且还发表了一些个人的观点,小萌就对数控老武的一些个人观点有点想不通呀!不过正是看到了这篇文章也激起了小萌想谈谈这些离线编程软件的欲望啦!所以呢今天小萌有一个重要的任务就是给大家普及一下国内外主流的离线编程软件以及这些离线编程软件各自的优缺点,相信大家在耐心的看完这篇文章的介绍后就不再是一个小白啦!大家也可以根据自己的需要选择适合自己的离线编程软件进行学习哦!
首先给大家说一下机器人编程。通常来讲,机器人编程可分为示教在线编程和离线编程。那么示教在线编程在实际应用中主要存在以下问题:
1、示教在线编程过程繁琐、效率低。
2、精度完全是靠示教者的目测决定,而且对于复杂的路径示教在线编程难以取得令人满意的效果。
基于对示教编程出现的弊端,那么离线编程就出现啦!与示教编程相比,离线编程又有什么优势呢?
1、减少机器人的停机时间,当对下一个任务进行编程时,机器人仍可在生产线上进行工作。
2、使编程者远离了危险的工作环境。
3、适用范围广,可对各种机器人进行编程,并能方便的实现优化编程。
4、可对复杂任务进行编程。
5、便于修改机器人程序。
小萌听到离线编程的这些优点后,很是好奇呢!迫不及待的想看看离线编程软件长什么样子。下面听小萌一一介绍一下主流的离线编程软件吧。
1.Robot Art
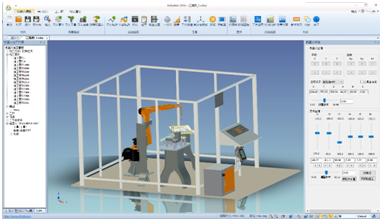
Robot Art来自帝都北京,是目前离线编程软件国内品牌中的顶尖的软件。软件根据几何数模的拓扑信息生成机器人运动轨迹,之后轨迹仿真、路径优化、后置代码一气呵成,同时集碰撞检测、场景渲染、动画输出于一体,可快速生成效果逼真的模拟动画。广泛应用于打磨、去毛刺、焊接、激光切割、数控加工等领域。
Robot Art教育版针对教学实际情况,增加了模拟示教器、自由装配等功能,帮助初学者在虚拟环境中快速认识机器人,快速学会机器人示教器基本操作,大大缩短学习周期,降低学习成本。
下图为RobotArt离线编程仿真软件的界面:
优点:
1)支持多种格式的三维CAD模型,可导入扩展名为step、igs、stl、x_t、prt(UG)、prt(ProE)、CATPart、sldpart等格式;
2)支持多种品牌工业机器人离线编程操作,如ABB、KUKA、Fanuc、Yaskawa、Staubli、KEBA系列、新时达、广数等);
3)拥有大量航空航天高端应用经验;
4)自动识别与搜索CAD模型的点、线、面信息生成轨迹;
5)轨迹与CAD模型特征关联,模型移动或变形,轨迹自动变化;
6)一键优化轨迹与几何级别的碰撞检测;
7)支持多种工艺包,如切割、焊接、喷涂、去毛刺、数控加工;
8)支持将整个工作站仿真动画发布到网页、手机端;
缺点:
软件不支持整个生产线仿真,对外国小品牌机器人也不支持,不过作为机器人离线编程,还是相当给力的,功能一点也不输给国外软件。
2.Robot Master
Robotmaster来自加拿大,由上海傲卡自动化代理,是目前离线编程软件国外品牌中的顶尖的软件,几乎支持市场上绝大多数机器人品牌(KUKA,ABB,Fanuc,Motoman,史陶比尔、珂玛、三菱、DENSO、松下……)。
下图为Robot Master软件界面:
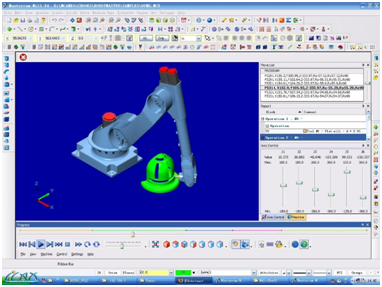
功能:Robotmaster在Mastercam中无缝集成了机器人编程、仿真和代码生成功能,提高了机器人编程速度。
优点:可以按照产品数模,生成程序,适用于切割、铣削、焊接、喷涂等等。独家的优化功能,运动学规划和碰撞检测非常精确,支持外部轴(直线导轨系统、旋转系统),并支持复合外部轴组合系统。
缺点:暂时不支持多台机器人同时模拟仿真,基于MasterCAM做的二次开发,价格昂贵,企业版在20W左右。
3.Robot Works
RobotWorks是来自以色列的机器人离线编程仿真软件,与Robot Master类似,是基于Solidworks做的二次开发。使用时,需要先购买Solidworks。主要功能如下:
(1)全面的数据接口:Robotworks是基于Solidworks平台开发,Solidworks可以通过IGES,DXF,DWG,PrarSolid,Step,VDA,SAT等标准接口进行数据转换。
(2)强大的编程能力:从输入CAD数据到输出机器人加工代码只需四步。
第一步:从Solidworks直接创建或直接导入其他三维CAD数据,选取定义好的机器人工具与要加工的工件组合成装配体。所有装配夹具和工具客户均可以用Solidworks自行创建调用;
第二步:Robotworks选取工具,然后直接选取曲面的边缘或者样条曲线进行加工产生数据点;
第三步:调用所需的机器人数据库,开始做碰撞检查和仿真,在每个数据点均可以自动修正,包含工具角度控制,引线设置,增加减少加工点,调整切割次序,在每个点增加工艺参数;
第四步:Robotworks自动产生各种机器人代码,包含笛卡尔坐标数据,关节坐标数据,工具与坐标系数据,加工工艺等,按照工艺要求保存不同的代码。
(3)强大的工业机器人数据库:系统支持市场上主流的大多数的工业机器人,提供各大工业机器人各个型号的三维数模。
(4)完美的仿真模拟:独特的机器人加工仿真系统可对机器人手臂,工具与工件之间的运动进行自动碰撞检查,轴超限检查,自动删除不合格路径并调整,还可以自动优化路径,减少空跑时间。
(5)开放的工艺库定义:
系统提供了完全开放的加工工艺指令文件库,用户可以按照自己的实际需求自行定义添加设置自己独特工艺,添加的任何指令都能输出到机器人加工数据里面。
缺点:Robotworks基于solidworks,solidworks本身不带CAM功能,编程繁琐,机器人运动学规划策略智能化程度低。
优点:生成轨迹方式多样、支持多种机器人、支持外部轴。
首先给大家说一下机器人编程。通常来讲,机器人编程可分为示教在线编程和离线编程。那么示教在线编程在实际应用中主要存在以下问题:
1、示教在线编程过程繁琐、效率低。
2、精度完全是靠示教者的目测决定,而且对于复杂的路径示教在线编程难以取得令人满意的效果。
基于对示教编程出现的弊端,那么离线编程就出现啦!与示教编程相比,离线编程又有什么优势呢?
1、减少机器人的停机时间,当对下一个任务进行编程时,机器人仍可在生产线上进行工作。
2、使编程者远离了危险的工作环境。
3、适用范围广,可对各种机器人进行编程,并能方便的实现优化编程。
4、可对复杂任务进行编程。
5、便于修改机器人程序。
小萌听到离线编程的这些优点后,很是好奇呢!迫不及待的想看看离线编程软件长什么样子。下面听小萌一一介绍一下主流的离线编程软件吧。
1.Robot Art
Robot Art来自帝都北京,是目前离线编程软件国内品牌中的顶尖的软件。软件根据几何数模的拓扑信息生成机器人运动轨迹,之后轨迹仿真、路径优化、后置代码一气呵成,同时集碰撞检测、场景渲染、动画输出于一体,可快速生成效果逼真的模拟动画。广泛应用于打磨、去毛刺、焊接、激光切割、数控加工等领域。
Robot Art教育版针对教学实际情况,增加了模拟示教器、自由装配等功能,帮助初学者在虚拟环境中快速认识机器人,快速学会机器人示教器基本操作,大大缩短学习周期,降低学习成本。
下图为RobotArt离线编程仿真软件的界面:
优点:
1)支持多种格式的三维CAD模型,可导入扩展名为step、igs、stl、x_t、prt(UG)、prt(ProE)、CATPart、sldpart等格式;
2)支持多种品牌工业机器人离线编程操作,如ABB、KUKA、Fanuc、Yaskawa、Staubli、KEBA系列、新时达、广数等);
3)拥有大量航空航天高端应用经验;
4)自动识别与搜索CAD模型的点、线、面信息生成轨迹;
5)轨迹与CAD模型特征关联,模型移动或变形,轨迹自动变化;
6)一键优化轨迹与几何级别的碰撞检测;
7)支持多种工艺包,如切割、焊接、喷涂、去毛刺、数控加工;
8)支持将整个工作站仿真动画发布到网页、手机端;
缺点:
软件不支持整个生产线仿真,对外国小品牌机器人也不支持,不过作为机器人离线编程,还是相当给力的,功能一点也不输给国外软件。
2.Robot Master
Robotmaster来自加拿大,由上海傲卡自动化代理,是目前离线编程软件国外品牌中的顶尖的软件,几乎支持市场上绝大多数机器人品牌(KUKA,ABB,Fanuc,Motoman,史陶比尔、珂玛、三菱、DENSO、松下……)。
下图为Robot Master软件界面:
功能:Robotmaster在Mastercam中无缝集成了机器人编程、仿真和代码生成功能,提高了机器人编程速度。
优点:可以按照产品数模,生成程序,适用于切割、铣削、焊接、喷涂等等。独家的优化功能,运动学规划和碰撞检测非常精确,支持外部轴(直线导轨系统、旋转系统),并支持复合外部轴组合系统。
缺点:暂时不支持多台机器人同时模拟仿真,基于MasterCAM做的二次开发,价格昂贵,企业版在20W左右。
3.Robot Works
RobotWorks是来自以色列的机器人离线编程仿真软件,与Robot Master类似,是基于Solidworks做的二次开发。使用时,需要先购买Solidworks。主要功能如下:
(1)全面的数据接口:Robotworks是基于Solidworks平台开发,Solidworks可以通过IGES,DXF,DWG,PrarSolid,Step,VDA,SAT等标准接口进行数据转换。
(2)强大的编程能力:从输入CAD数据到输出机器人加工代码只需四步。
第一步:从Solidworks直接创建或直接导入其他三维CAD数据,选取定义好的机器人工具与要加工的工件组合成装配体。所有装配夹具和工具客户均可以用Solidworks自行创建调用;
第二步:Robotworks选取工具,然后直接选取曲面的边缘或者样条曲线进行加工产生数据点;
第三步:调用所需的机器人数据库,开始做碰撞检查和仿真,在每个数据点均可以自动修正,包含工具角度控制,引线设置,增加减少加工点,调整切割次序,在每个点增加工艺参数;
第四步:Robotworks自动产生各种机器人代码,包含笛卡尔坐标数据,关节坐标数据,工具与坐标系数据,加工工艺等,按照工艺要求保存不同的代码。
(3)强大的工业机器人数据库:系统支持市场上主流的大多数的工业机器人,提供各大工业机器人各个型号的三维数模。
(4)完美的仿真模拟:独特的机器人加工仿真系统可对机器人手臂,工具与工件之间的运动进行自动碰撞检查,轴超限检查,自动删除不合格路径并调整,还可以自动优化路径,减少空跑时间。
(5)开放的工艺库定义:
系统提供了完全开放的加工工艺指令文件库,用户可以按照自己的实际需求自行定义添加设置自己独特工艺,添加的任何指令都能输出到机器人加工数据里面。
缺点:Robotworks基于solidworks,solidworks本身不带CAM功能,编程繁琐,机器人运动学规划策略智能化程度低。
优点:生成轨迹方式多样、支持多种机器人、支持外部轴。
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)