一文看懂最新机器人离线编程软件
时间:04-06
来源:互联网
点击:
4.ROBCAD
ROBCAD是西门子旗下的软件,软件较庞大,重点在生产线仿真,价格也是同软件中顶尖的。软件支持离线点焊、支持多台机器人仿真、支持非机器人运动机构仿真,精确的节拍仿真,ROBCAD主要应用于产品生命周期中的概念设计和结构设计两个前期阶段,其主要特点包括:
(1)与主流的CAD软件(如NX、CATIA、IDEAS)无缝集成。
(2)实现工具工装、机器人和操作者的三维可视化。
(3)制造单元、测试以及编程的仿真。
ROBCAD的主要功能包括:
(1)Workcelland Modeling:对白车身生产线进行设计、管理和信息控制。
(2)Spotand OLP:完成点焊工艺设计和离线编程。
(3)Human:实现人因工程分析。
(4)Application中的Paint、Arc、Laser等模块:实现生产制造中喷涂,弧焊,激光加工,绲边等等工艺的仿真验证及离线程序输出。
(5)ROBCAD的Paint模块。喷漆的设计、优化和离线编程,其功能包括:喷漆路线的自动生成、多种颜色喷漆厚度的仿真、喷漆过程的优化。
缺点:价格昂贵,离线功能较弱,Unix移植过来的界面,人机界面不友好。
ROBCAD软件界面

5.DELMIA
DELMIA是达索旗下的CAM软件,大名鼎鼎的CATIA是达索旗下的CAD软件。DELMIA有6大模块,其中Robotics解决方案涵盖汽车领域的发动机、总装和白车身(Body-in-White),航空领域的机身装配、维修维护,以及一般制造业的制造工艺。
DELMIA的机器人模块ROBOTICS是一个可伸缩的解决方案,利用强大的PPR集成中枢快速进行机器人工作单元建立、仿真与验证,是一个完整的、可伸缩的、柔性的解决方案。使用DELMIA机器人模块,用户能够容易地:
(1)从可搜索的含有超过400种以上的机器人的资源目录中,下载机器人和其它的工具资源。
(2)利用工厂布置规划工程师所完成的工作。
(3)加入工作单元中工艺所需的资源进一步细化布局。
缺点:DELMIA属于专家型软件,操作难度太高,不适宜高职学生学习,需要机器人专业研究生以上学生使用;工业正版单价也在百万级别。
6.RobotStudio
RobotStudio是瑞士ABB公司配套的软件,是机器人本体商中软件做的最好的一款。。RobotStudio支持机器人的整个生命周期,使用图形化编程、编辑和调试机器人系统来创建机器人的运行,并模拟优化现有的机器人程序。Robot Studio包括如下功能:
(1)CAD导入。可方便地导入各种主流CAD格式的数据,包括IGES、STEP、VRML、VDAFS、ACIS及CATIA等。机器人程序员可依据这些精确的数据编制精度更高的机器人程序,从而提高产品质量。
(2)Auto Path功能。该功能通过使用待加工零件的CAD模型,仅在数分钟之内便可自动生成跟踪加工曲线所需要的机器人位置(路径),而这项任务以往通常需要数小时甚至数天。
(3)程序编辑器。可生成机器人程序,使用户能够在Windows环境中离线开发或维护机器人程序,可显著缩短编程时间、改进程序结构。
(4)路径优化。如果程序包含接近奇异点的机器人动作,RobotStudio可自动检测出来并发出报警,从而防止机器人在实际运行中发生这种现象。仿真监视器是一种用于机器人运动优化的可视工具,红色线条显示可改进之处,以使机器人按照最有效方式运行。可以对TCP速度、加速度、奇异点或轴线等进行优化,缩短周期时间。
(5)可达性分析。通过Autoreach可自动进行可到达性分析,使用十分方便,用户可通过该功能任意移动机器人或工件,直到所有位置均可到达,在数分钟之内便可完成工作单元平面布置验证和优化。
(6)虚拟示教台。是实际示教台的图形显示,其核心技术是Virtual Robot。
从本质上讲,所有可以在实际示教台上进行的工作都可以在虚拟示教台
(QuickTeach?)上完成,因而是一种非常出色的教学和培训工具。
(7)事件表。一种用于验证程序的结构与逻辑的理想工具。程序执行期间,可通过该工具直接观察工作单元的I/O状态。可将I/O连接到仿真事件,实现工位内机器人及所有设备的仿真。该功能是一种十分理想的调试工具。
(8)碰撞检测。碰撞检测功能可避免设备碰撞造成的严重损失。选定检测对象后,RobotStudio可自动监测并显示程序执行时这些对象是否会发生碰撞。
(9)VBA功能。可采用VBA改进和扩充RobotStudio功能,根据用户具体需要开发功能强大的外接插件、宏,或定制用户界面。
(10)直接上传和下载。整个机器人程序无需任何转换便可直接下载到实际机器人系统,该功能得益于ABB独有的Virtual Robot技术。
缺点,就是只支持本公司品牌机器人,机器人间的兼容性很差。
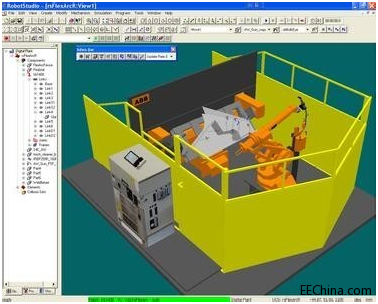
Robot Studio软件界面
ROBCAD是西门子旗下的软件,软件较庞大,重点在生产线仿真,价格也是同软件中顶尖的。软件支持离线点焊、支持多台机器人仿真、支持非机器人运动机构仿真,精确的节拍仿真,ROBCAD主要应用于产品生命周期中的概念设计和结构设计两个前期阶段,其主要特点包括:
(1)与主流的CAD软件(如NX、CATIA、IDEAS)无缝集成。
(2)实现工具工装、机器人和操作者的三维可视化。
(3)制造单元、测试以及编程的仿真。
ROBCAD的主要功能包括:
(1)Workcelland Modeling:对白车身生产线进行设计、管理和信息控制。
(2)Spotand OLP:完成点焊工艺设计和离线编程。
(3)Human:实现人因工程分析。
(4)Application中的Paint、Arc、Laser等模块:实现生产制造中喷涂,弧焊,激光加工,绲边等等工艺的仿真验证及离线程序输出。
(5)ROBCAD的Paint模块。喷漆的设计、优化和离线编程,其功能包括:喷漆路线的自动生成、多种颜色喷漆厚度的仿真、喷漆过程的优化。
缺点:价格昂贵,离线功能较弱,Unix移植过来的界面,人机界面不友好。
ROBCAD软件界面
5.DELMIA
DELMIA是达索旗下的CAM软件,大名鼎鼎的CATIA是达索旗下的CAD软件。DELMIA有6大模块,其中Robotics解决方案涵盖汽车领域的发动机、总装和白车身(Body-in-White),航空领域的机身装配、维修维护,以及一般制造业的制造工艺。
DELMIA的机器人模块ROBOTICS是一个可伸缩的解决方案,利用强大的PPR集成中枢快速进行机器人工作单元建立、仿真与验证,是一个完整的、可伸缩的、柔性的解决方案。使用DELMIA机器人模块,用户能够容易地:
(1)从可搜索的含有超过400种以上的机器人的资源目录中,下载机器人和其它的工具资源。
(2)利用工厂布置规划工程师所完成的工作。
(3)加入工作单元中工艺所需的资源进一步细化布局。
缺点:DELMIA属于专家型软件,操作难度太高,不适宜高职学生学习,需要机器人专业研究生以上学生使用;工业正版单价也在百万级别。
6.RobotStudio
RobotStudio是瑞士ABB公司配套的软件,是机器人本体商中软件做的最好的一款。。RobotStudio支持机器人的整个生命周期,使用图形化编程、编辑和调试机器人系统来创建机器人的运行,并模拟优化现有的机器人程序。Robot Studio包括如下功能:
(1)CAD导入。可方便地导入各种主流CAD格式的数据,包括IGES、STEP、VRML、VDAFS、ACIS及CATIA等。机器人程序员可依据这些精确的数据编制精度更高的机器人程序,从而提高产品质量。
(2)Auto Path功能。该功能通过使用待加工零件的CAD模型,仅在数分钟之内便可自动生成跟踪加工曲线所需要的机器人位置(路径),而这项任务以往通常需要数小时甚至数天。
(3)程序编辑器。可生成机器人程序,使用户能够在Windows环境中离线开发或维护机器人程序,可显著缩短编程时间、改进程序结构。
(4)路径优化。如果程序包含接近奇异点的机器人动作,RobotStudio可自动检测出来并发出报警,从而防止机器人在实际运行中发生这种现象。仿真监视器是一种用于机器人运动优化的可视工具,红色线条显示可改进之处,以使机器人按照最有效方式运行。可以对TCP速度、加速度、奇异点或轴线等进行优化,缩短周期时间。
(5)可达性分析。通过Autoreach可自动进行可到达性分析,使用十分方便,用户可通过该功能任意移动机器人或工件,直到所有位置均可到达,在数分钟之内便可完成工作单元平面布置验证和优化。
(6)虚拟示教台。是实际示教台的图形显示,其核心技术是Virtual Robot。
从本质上讲,所有可以在实际示教台上进行的工作都可以在虚拟示教台
(QuickTeach?)上完成,因而是一种非常出色的教学和培训工具。
(7)事件表。一种用于验证程序的结构与逻辑的理想工具。程序执行期间,可通过该工具直接观察工作单元的I/O状态。可将I/O连接到仿真事件,实现工位内机器人及所有设备的仿真。该功能是一种十分理想的调试工具。
(8)碰撞检测。碰撞检测功能可避免设备碰撞造成的严重损失。选定检测对象后,RobotStudio可自动监测并显示程序执行时这些对象是否会发生碰撞。
(9)VBA功能。可采用VBA改进和扩充RobotStudio功能,根据用户具体需要开发功能强大的外接插件、宏,或定制用户界面。
(10)直接上传和下载。整个机器人程序无需任何转换便可直接下载到实际机器人系统,该功能得益于ABB独有的Virtual Robot技术。
缺点,就是只支持本公司品牌机器人,机器人间的兼容性很差。
Robot Studio软件界面
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)