语音识别在微机器人控制系统中的应用
时间:12-14
来源:互联网
点击:
2 实验结果
实验采用30个人(15男,15女)的声音模型进行识别。首先由10人(5男,5女)对5个命令词(前进、后退、左移、右移、快速)分别进行初始数据训练,每人每词训练10次,得到训练模板。然后再由这30人随机进行非特定人语音识别。采用6状态的HMM模型,高斯混合度选为14,得到图3的实验结果。
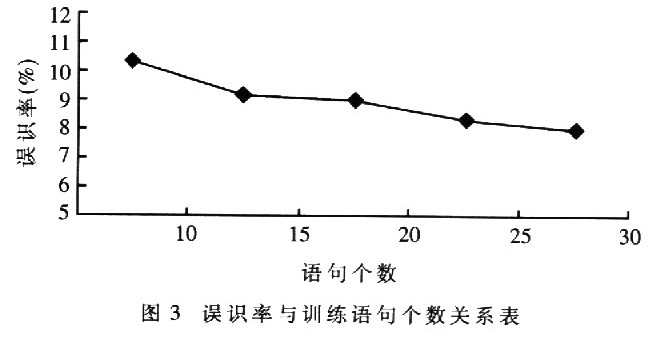
由图3可以看出,由于本系统实时学习的特点,系统的识别率随着训练数据的增加而逐步上升(误识率下降)。但是当实验数据继续增多时,系统的识别率和实时性都有下降趋势。这是由于系统处于无人监管状态,根据判断结果进行参数重估。如果判断结果错误,势必将错误带人参数重估步骤中。
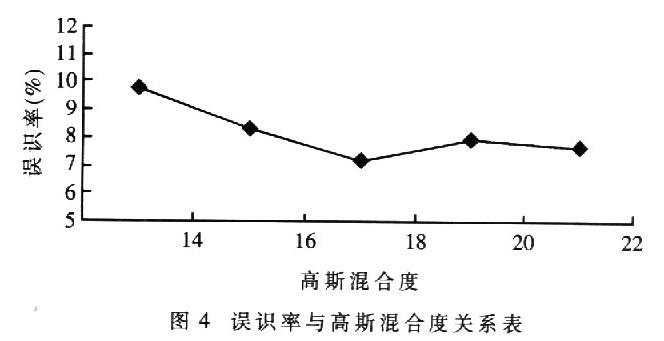
逐步增加高斯混合度数目,可以得到图4的实验结果。可见高斯混合度在18的时候达到较好的识别效果,混合度太高识别率反而会有所下降,这是由于嵌入式系统的资源有限,运算复杂度的增长超过了嵌入式设备的限制所造成的。
为了使微机器人能够正确地执行人的声音指令,本文将语音识别的过程嵌入微机器人的控制系统中,根据微机器人控制系统资源有限、对实时性要求高的特点,使用增量K均值分段HMM的算法,简化计算节省了所需的硬件资源,实现了实时学习的语音识别,能方便地对微机器人进行控制。
本系统的识别率达到了较高的标准,又由于加入了智能化的用户选择部分,用户可随时选择学习新的语句,使其有更广阔的应用前景。
由于嵌入式平台受到处理速度、存储空间的限制,所以能够对微机器人发出的指令十分有限,识别率还有待提高。因此,研究语音识别算法,比较各种算法的优缺点,进而在嵌入式微机器人控制系统上实现大词汇量非特定人的语音识别,实现真正意义上的人机交流是今后进一步的工作。
实验采用30个人(15男,15女)的声音模型进行识别。首先由10人(5男,5女)对5个命令词(前进、后退、左移、右移、快速)分别进行初始数据训练,每人每词训练10次,得到训练模板。然后再由这30人随机进行非特定人语音识别。采用6状态的HMM模型,高斯混合度选为14,得到图3的实验结果。
由图3可以看出,由于本系统实时学习的特点,系统的识别率随着训练数据的增加而逐步上升(误识率下降)。但是当实验数据继续增多时,系统的识别率和实时性都有下降趋势。这是由于系统处于无人监管状态,根据判断结果进行参数重估。如果判断结果错误,势必将错误带人参数重估步骤中。
逐步增加高斯混合度数目,可以得到图4的实验结果。可见高斯混合度在18的时候达到较好的识别效果,混合度太高识别率反而会有所下降,这是由于嵌入式系统的资源有限,运算复杂度的增长超过了嵌入式设备的限制所造成的。
为了使微机器人能够正确地执行人的声音指令,本文将语音识别的过程嵌入微机器人的控制系统中,根据微机器人控制系统资源有限、对实时性要求高的特点,使用增量K均值分段HMM的算法,简化计算节省了所需的硬件资源,实现了实时学习的语音识别,能方便地对微机器人进行控制。
本系统的识别率达到了较高的标准,又由于加入了智能化的用户选择部分,用户可随时选择学习新的语句,使其有更广阔的应用前景。
由于嵌入式平台受到处理速度、存储空间的限制,所以能够对微机器人发出的指令十分有限,识别率还有待提高。因此,研究语音识别算法,比较各种算法的优缺点,进而在嵌入式微机器人控制系统上实现大词汇量非特定人的语音识别,实现真正意义上的人机交流是今后进一步的工作。
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)