清洁机器人之吸尘机器人控制系统的设计
时间:12-07
来源:互联网
点击:
2 电机控制系统
在小功率系统中,直流电机线性特性良好,控制性能优越,适合于点位和速度控制。为了实现直流电机的正反转运行,只需要改变电机电源电压的极性。电压极性的变化和运行时间的长短可以由处理器实现,而提供直流电机正常运行的电流则需要驱动电路。
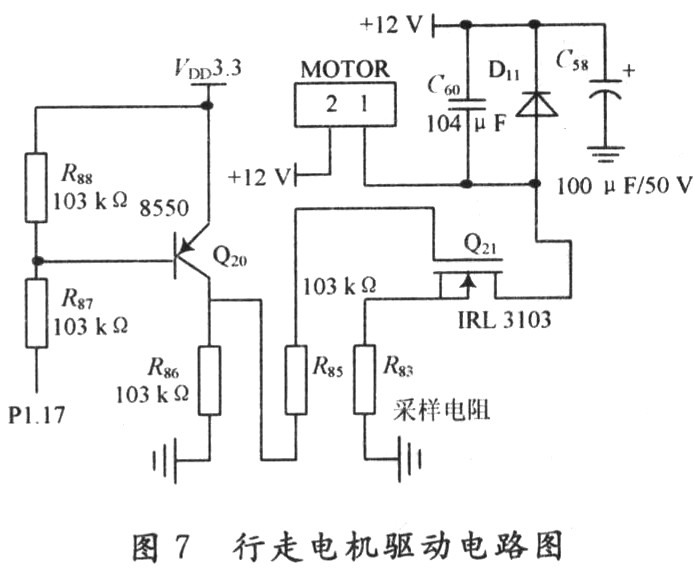
H桥式驱动电路是比较常用的驱动电路。该设计两个行走驱动电机采用分立器件功率场效应管和续流二极管搭建,成本低,便于散热,如图6所示。

用ARM7的P0.8和P0.9来控制电机,这两个管脚都是PWM输出管脚,可以控制电机的速度。该部分主要保证机器人能够在平面内移动,同时轮上带有编码器,可以对行走的路程进行检测。通过航位推算可以实现机器人的转弯,假设机器人光电码盘的分度数为N;控制器收到的脉冲数为m;轮子的直径为D;两个轮子之间的间距为W,则轮子前进的距离为:

设机器人在环境坐标系中的位姿为(X(t),Y(t),φ(t)),则第n+1次采样的方位角φn+1值和第n次采样的φ值有以下关系:
式中:vR(t)和vL(t)分别是在t时刻两轮的速度;△SLn和△SRn为两个主动轮从第n次采样时刻到第n+1次采样时刻之间所行走的距离。

如果规定要进行原地转弯,就是一个轮子正转,另外一个轮子反转的方式那么:
3 结语
清洁机器人作为服务机器人的一种,有着巨大的市场潜力和广阔的应用前景。随着传感技术的发展和微处理器的不断进步,价格也在不断下降。在此研究和设计一个基于ARM7微处理器的清洁机器人控制系统,不仅满足了实用性的要求,而且在不增加成本的基础上为软件提供了良好的硬件支持,为更好的算法和软件升级提供良好的技术支持。
在小功率系统中,直流电机线性特性良好,控制性能优越,适合于点位和速度控制。为了实现直流电机的正反转运行,只需要改变电机电源电压的极性。电压极性的变化和运行时间的长短可以由处理器实现,而提供直流电机正常运行的电流则需要驱动电路。
H桥式驱动电路是比较常用的驱动电路。该设计两个行走驱动电机采用分立器件功率场效应管和续流二极管搭建,成本低,便于散热,如图6所示。
用ARM7的P0.8和P0.9来控制电机,这两个管脚都是PWM输出管脚,可以控制电机的速度。该部分主要保证机器人能够在平面内移动,同时轮上带有编码器,可以对行走的路程进行检测。通过航位推算可以实现机器人的转弯,假设机器人光电码盘的分度数为N;控制器收到的脉冲数为m;轮子的直径为D;两个轮子之间的间距为W,则轮子前进的距离为:
设机器人在环境坐标系中的位姿为(X(t),Y(t),φ(t)),则第n+1次采样的方位角φn+1值和第n次采样的φ值有以下关系:
式中:vR(t)和vL(t)分别是在t时刻两轮的速度;△SLn和△SRn为两个主动轮从第n次采样时刻到第n+1次采样时刻之间所行走的距离。
如果规定要进行原地转弯,就是一个轮子正转,另外一个轮子反转的方式那么:
3 结语
清洁机器人作为服务机器人的一种,有着巨大的市场潜力和广阔的应用前景。随着传感技术的发展和微处理器的不断进步,价格也在不断下降。在此研究和设计一个基于ARM7微处理器的清洁机器人控制系统,不仅满足了实用性的要求,而且在不增加成本的基础上为软件提供了良好的硬件支持,为更好的算法和软件升级提供良好的技术支持。
机器人 红外 传感器 电源管理 电压 电路 DSP ARM 仿真 PWM 编码器 LCD LED 二极管 三极管 集成电路 电流 场效应管 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)