清洁机器人之吸尘机器人控制系统的设计
时间:12-07
来源:互联网
点击:
随着人口的老龄化和社会福利制度的完善,导致劳动力成本的急剧上升,一些简单的重复性的体力劳动为服务机器人提供了广阔的市场。清洁机器人是服务机器人的一种,可以代替人进行清扫房间、车间、墙壁等。提出一种应用于室内的移动清洁机器人的设计方案。其具有实用价值。室内清洁机器人的主要任务是能够代替人进行清扫工作,因此需要有一定的智能。清洁机器人应该具备以下能力:能够自我导航,检测出墙壁,房间内的障碍物并且能够避开;能够走遍房间的大部分空间,可以检测出电池的电量并且能够自主返回充电,同时要求外形比较紧凑,运行稳定,噪音小;要具有人性化的接口,便于操作和控制。结合清洁机器人主要功能探讨其控制系统的硬件设计。
1 测控系统及功能
为了使吸尘机器人运动更加流畅,防止出现卡死的现象,把吸尘机器人外观设计成扁圆柱形的,扁圆形的设计可以使其自由进入沙发、床和家具底下,把一些边角都能够清扫干净。与地面平行的圆形底盘由三个轮子共同支撑,左右两侧的为驱动轮,分别由两个微型直流电机直接驱动,前面的支撑轮为万向轮。机器人的这种外形和车轮布局可使其方便地实现原地转弯,大大提高了行走的灵巧性,这在空间范围较小的地方更为突出。采用碰撞、超声波和红外传感器组成多传感器系统,在机器人的上方装有红外接收装置;在机器人的底部边缘.每隔45°装有接近传感器,用来检测台阶,防止跌落;在机器人的前方装有碰撞传感器,前方和左右装有超声波传感器,用来检测周围环境。机器人上装有电源管理系统,如果电压过低会停止清扫,并且去自动充电。
1.1 微控制器
传统的微处理器如51系列虽然开发周期短,成本低,但其实时性不好,难以实现复杂的控制算法;另外,增加的外围电路数据转换速度慢,使机器人的性能得不到充分的发挥。高速DSP的出现虽然使得系统模块化和全数字化,但其开发成本高。与DSP具有同等性能的ARM微处理器资源丰富,具有很好的通用性,其主要技术优点是高性能,低价格,低功耗,广泛地应用于各个领域,因此将ARM应用于机器人控制系统不失为一种好的策略。LPC2210是飞利浦带有一个支持实时仿真和跟踪的ARM7TDMI-S微处理器,其采用3级流水线技术,能够并行处理指令。由于具有非常小的尺寸和极低的功耗,多个32位定时器、PWM输出和32个GPIO使它特别适用于工业控制和小型机器人系统,满足了机器人对控制器运算速度的要求。以LPC2210为核心。设计结构简单,性能稳定的清洁机器人车体系统。
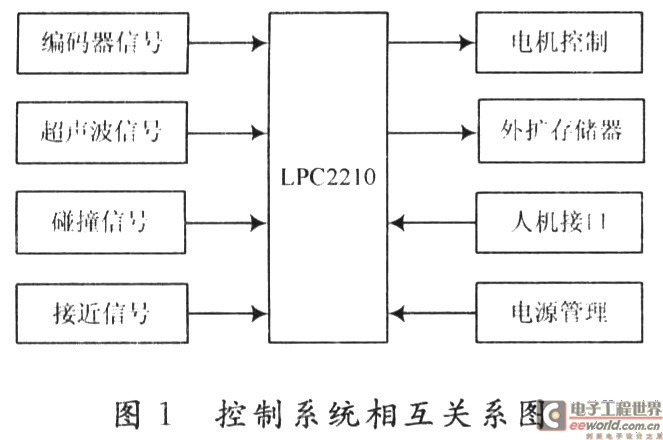
机器人控制系统主要完成的任务:接收传感器和编码器传来的数据,综合处理进行清扫路径规划;驱动左右轮前进行走,控制清扫、吸尘机构,完成各种底层控制动作;设计合适的人机接口,在LCD上显示机器人状态和运行时间。因此,机器人控制系统包括传感器模块,电机驱动模块.
这一款超声波传感器有以下优点:适应各种环境,不受灰尘和光线的影响;盲区为2.5cm。可以把传感器安装在合适的位置就可以避开盲区;探测发散角度为15°,反应距离2.5m以内,该课题的检测距离为0.5m。超声波传感器的基本原理是测量从声波发射和回到接收器所用的时间。这一款传感器的的发射端口和接收端口是一个管脚,首先由控制器发射一个5μs宽度的高电平脉冲来激发传感器发射40kHz的超声波,脉冲发出750μs后,管脚电平置高;当传感器接收到回波时,管脚的电平被拉低。由信号端高电平的宽度就可以知道由发射到返回需要的时间,宽度为115μs~18.5ms之间。公式s=vt/2,其中s表示传感器与目标的距离;t表示发射到回收的时间;v是声波速度,v=340m/s。由此可以知道传感器与障碍物之间的距离。一次探测时间最多是20ms,5个传感器查询完毕,用时l00ms,因此两个相邻传感器采用分时段进行使能,就会避免相互干扰,而不会影响机器人速度。
1.2.2 红外接近传感器
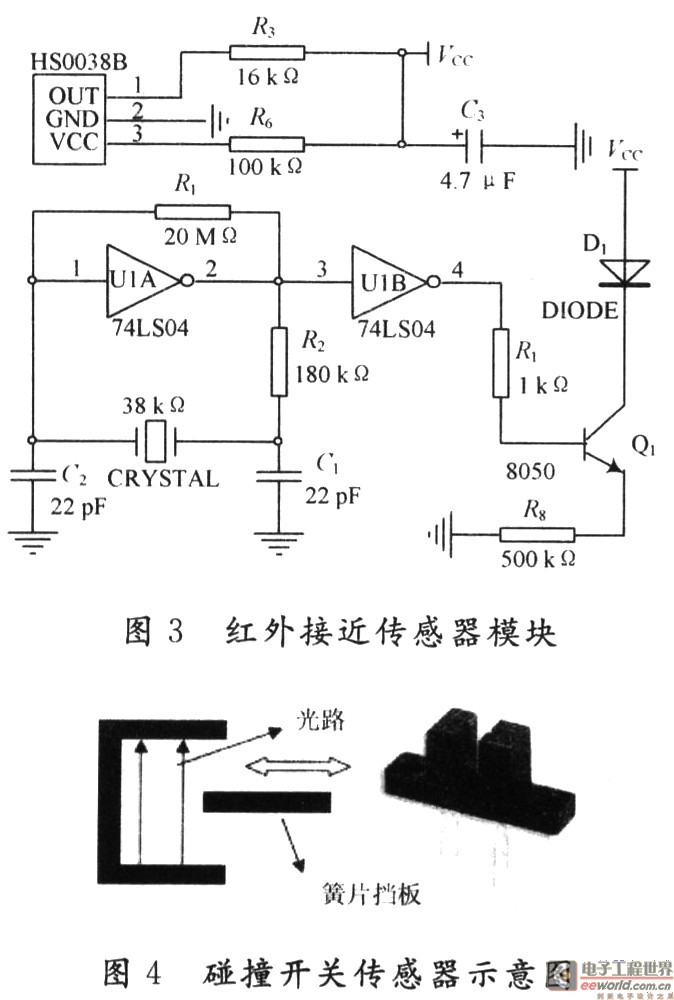
反射式光电开关是由红外LED光源和光敏二极管或光敏晶体管等光敏元件组成,当有障碍物阻拦时光线能够反射回来,输出为低电平信号;当没有障碍物阻拦时,光线不能反射回来,输出为高电平信号。
吸尘机器人的近距离红外接近传感器由两组相同的红外发射、接收电路组成。每一组电路可分为高频脉冲信号产生、红外发射调节与控制、红外发射驱动、红外接收等几个部分。通过38kHz晶振和非门电路得到一个38kHz的调制脉冲信号;利用三极管驱动红外发射管(TSAL6200)的发射。发射管发出的红外光经物体反射后被红外接收模块接收。通过接收头(HS0038B)内部自带的集成电路处理后返回一个数字信号,输入到微控制器的I/O口,如图3所示。接收头如果接收到38kHz的红外脉冲就会返回输出低电平,否则就会输出高电平。通过对I/0口的检测,便可以判断物体的有无。
1.2.3碰撞开关传感器
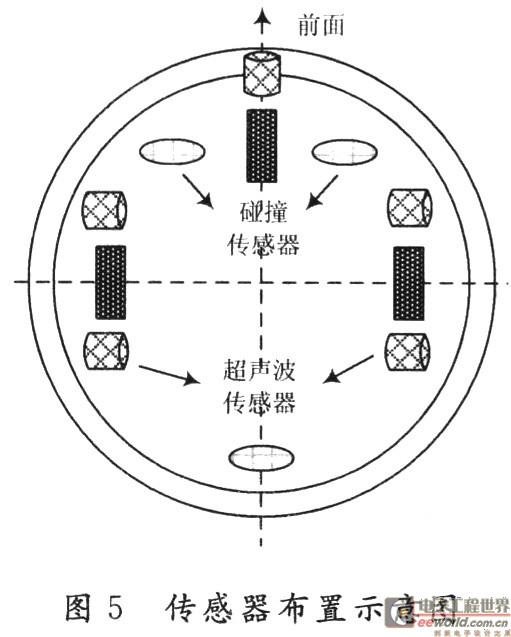
两个槽型对射光电开关均布在机器人左前和右前办。如此的布局可以使机器人感知来自前方、左前、右前三个方向的障碍物,从而根据障碍物方向的不同做出不同的反应。当机器人碰到障碍物时,弹簧在障碍物的作用下,向内压迫碰撞开关摆臂,促使簧片挡住光电开关的光线,输出低电平。当没有障碍物作用时,簧片在弹簧的作用下恢复,光电开关的光线没有被遮挡,输出高电平,如图4所示。
这三个传感器中,超声波传感器用来探测前方和左右的墙壁、障碍。左边和右边的两个超声波传感器垂直于行走方向放置,用于机器人的沿边行走规划;设定机器人行走时与墙边的距离值,调节机器人的行走方向,使两个超声波与墙边的距离近似等于设定值,保持机器人沿墙行走时保持适当的距离,不会撞到或者远离墙壁。前方两个碰撞传感器和一个超声波配合用来用来探测前半部分的环境;接触传感器具有检测范围大、信号无需调理、占用资源少的优点,通过接触碰撞,检测那些未能被超声波传感器检测到的杆状障碍比如家具腿等,传感器之间的位置如图5所示。
接近传感器用来探测地面是否有悬崖,在机器人底部的正前、左前、右前和后方各布置1个。除了上述三种传感器以外,在三个轮子上都装有一个常开的开关传感器,当轮子悬空的时候,开关就会闭合,输出低电平。当轮子悬空时可以让机器人停止运转。
1 测控系统及功能
为了使吸尘机器人运动更加流畅,防止出现卡死的现象,把吸尘机器人外观设计成扁圆柱形的,扁圆形的设计可以使其自由进入沙发、床和家具底下,把一些边角都能够清扫干净。与地面平行的圆形底盘由三个轮子共同支撑,左右两侧的为驱动轮,分别由两个微型直流电机直接驱动,前面的支撑轮为万向轮。机器人的这种外形和车轮布局可使其方便地实现原地转弯,大大提高了行走的灵巧性,这在空间范围较小的地方更为突出。采用碰撞、超声波和红外传感器组成多传感器系统,在机器人的上方装有红外接收装置;在机器人的底部边缘.每隔45°装有接近传感器,用来检测台阶,防止跌落;在机器人的前方装有碰撞传感器,前方和左右装有超声波传感器,用来检测周围环境。机器人上装有电源管理系统,如果电压过低会停止清扫,并且去自动充电。
1.1 微控制器
传统的微处理器如51系列虽然开发周期短,成本低,但其实时性不好,难以实现复杂的控制算法;另外,增加的外围电路数据转换速度慢,使机器人的性能得不到充分的发挥。高速DSP的出现虽然使得系统模块化和全数字化,但其开发成本高。与DSP具有同等性能的ARM微处理器资源丰富,具有很好的通用性,其主要技术优点是高性能,低价格,低功耗,广泛地应用于各个领域,因此将ARM应用于机器人控制系统不失为一种好的策略。LPC2210是飞利浦带有一个支持实时仿真和跟踪的ARM7TDMI-S微处理器,其采用3级流水线技术,能够并行处理指令。由于具有非常小的尺寸和极低的功耗,多个32位定时器、PWM输出和32个GPIO使它特别适用于工业控制和小型机器人系统,满足了机器人对控制器运算速度的要求。以LPC2210为核心。设计结构简单,性能稳定的清洁机器人车体系统。
机器人控制系统主要完成的任务:接收传感器和编码器传来的数据,综合处理进行清扫路径规划;驱动左右轮前进行走,控制清扫、吸尘机构,完成各种底层控制动作;设计合适的人机接口,在LCD上显示机器人状态和运行时间。因此,机器人控制系统包括传感器模块,电机驱动模块.
这一款超声波传感器有以下优点:适应各种环境,不受灰尘和光线的影响;盲区为2.5cm。可以把传感器安装在合适的位置就可以避开盲区;探测发散角度为15°,反应距离2.5m以内,该课题的检测距离为0.5m。超声波传感器的基本原理是测量从声波发射和回到接收器所用的时间。这一款传感器的的发射端口和接收端口是一个管脚,首先由控制器发射一个5μs宽度的高电平脉冲来激发传感器发射40kHz的超声波,脉冲发出750μs后,管脚电平置高;当传感器接收到回波时,管脚的电平被拉低。由信号端高电平的宽度就可以知道由发射到返回需要的时间,宽度为115μs~18.5ms之间。公式s=vt/2,其中s表示传感器与目标的距离;t表示发射到回收的时间;v是声波速度,v=340m/s。由此可以知道传感器与障碍物之间的距离。一次探测时间最多是20ms,5个传感器查询完毕,用时l00ms,因此两个相邻传感器采用分时段进行使能,就会避免相互干扰,而不会影响机器人速度。
1.2.2 红外接近传感器
反射式光电开关是由红外LED光源和光敏二极管或光敏晶体管等光敏元件组成,当有障碍物阻拦时光线能够反射回来,输出为低电平信号;当没有障碍物阻拦时,光线不能反射回来,输出为高电平信号。
吸尘机器人的近距离红外接近传感器由两组相同的红外发射、接收电路组成。每一组电路可分为高频脉冲信号产生、红外发射调节与控制、红外发射驱动、红外接收等几个部分。通过38kHz晶振和非门电路得到一个38kHz的调制脉冲信号;利用三极管驱动红外发射管(TSAL6200)的发射。发射管发出的红外光经物体反射后被红外接收模块接收。通过接收头(HS0038B)内部自带的集成电路处理后返回一个数字信号,输入到微控制器的I/O口,如图3所示。接收头如果接收到38kHz的红外脉冲就会返回输出低电平,否则就会输出高电平。通过对I/0口的检测,便可以判断物体的有无。
1.2.3碰撞开关传感器
两个槽型对射光电开关均布在机器人左前和右前办。如此的布局可以使机器人感知来自前方、左前、右前三个方向的障碍物,从而根据障碍物方向的不同做出不同的反应。当机器人碰到障碍物时,弹簧在障碍物的作用下,向内压迫碰撞开关摆臂,促使簧片挡住光电开关的光线,输出低电平。当没有障碍物作用时,簧片在弹簧的作用下恢复,光电开关的光线没有被遮挡,输出高电平,如图4所示。
这三个传感器中,超声波传感器用来探测前方和左右的墙壁、障碍。左边和右边的两个超声波传感器垂直于行走方向放置,用于机器人的沿边行走规划;设定机器人行走时与墙边的距离值,调节机器人的行走方向,使两个超声波与墙边的距离近似等于设定值,保持机器人沿墙行走时保持适当的距离,不会撞到或者远离墙壁。前方两个碰撞传感器和一个超声波配合用来用来探测前半部分的环境;接触传感器具有检测范围大、信号无需调理、占用资源少的优点,通过接触碰撞,检测那些未能被超声波传感器检测到的杆状障碍比如家具腿等,传感器之间的位置如图5所示。
接近传感器用来探测地面是否有悬崖,在机器人底部的正前、左前、右前和后方各布置1个。除了上述三种传感器以外,在三个轮子上都装有一个常开的开关传感器,当轮子悬空的时候,开关就会闭合,输出低电平。当轮子悬空时可以让机器人停止运转。
机器人 红外 传感器 电源管理 电压 电路 DSP ARM 仿真 PWM 编码器 LCD LED 二极管 三极管 集成电路 电流 场效应管 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)