基于DSP的机器人视觉伺服系统研究与设计
时间:11-27
来源:互联网
点击:
3 图像雅可比矩阵
对于图像反馈机器人视觉伺服系统控制机构,图像雅可比矩阵是很关键的,它描述了机器人空间中的运动与图像特征空间中的运动之间的关系:
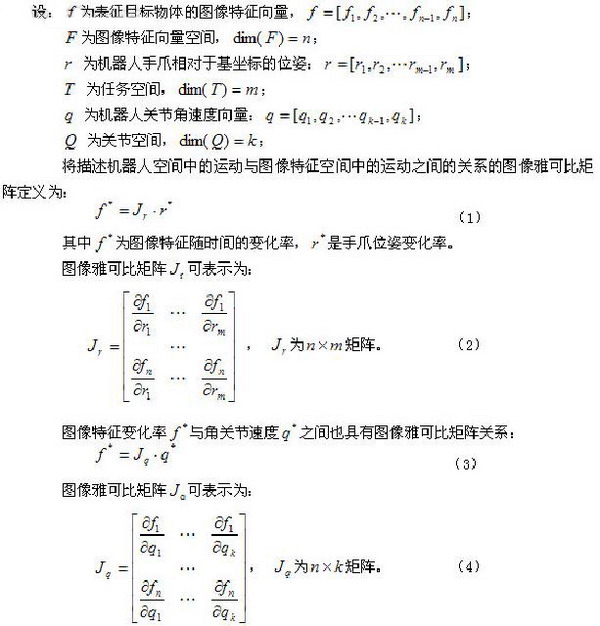
式 (2),(4)是图像雅可比矩阵的两种表示形式,是基于图像反馈的视觉跟踪研究的基础。需要指出的是,为了确保得到唯一的图像特征矢量,图像特征空间维数应该大于或等于位姿空间维数(n≧m)。
计算图像雅可比矩阵的方法有在线估计法、经验方法和学习方法。在线估计法通过动态估算得到图像雅可比矩阵;经验法可以通过标定或先验模型知识得到图像雅可比矩阵;学习方法主要可以利用离线示教和神经网络方法得到雅可比矩阵。
结论
本文分析了机器人视觉伺服系统的基本原理,并设计了基于TMS320C6201和可编程逻辑器件FPGA协处理结构的视觉系统,实现了图像采集和图像目标的实时处理。在实验室中我们利用所设计的视觉系统构建了实验平台,通过实验验证了所设计的视觉系统满足机器人视觉伺服系统的实时要求。
本文作者创新点:对于机器人视觉伺服系统,实时性问题一直是一个难以解决的重要问题。本文创新采用TMS320C6201芯片来实现机器人视觉伺服的图像处理,并采用FPGA协处理,提高了图像处理速度,实验验证了所设计系统满足机器人视觉伺服的实时要求,具有广泛的工业应用前景。
对于图像反馈机器人视觉伺服系统控制机构,图像雅可比矩阵是很关键的,它描述了机器人空间中的运动与图像特征空间中的运动之间的关系:
式 (2),(4)是图像雅可比矩阵的两种表示形式,是基于图像反馈的视觉跟踪研究的基础。需要指出的是,为了确保得到唯一的图像特征矢量,图像特征空间维数应该大于或等于位姿空间维数(n≧m)。
计算图像雅可比矩阵的方法有在线估计法、经验方法和学习方法。在线估计法通过动态估算得到图像雅可比矩阵;经验法可以通过标定或先验模型知识得到图像雅可比矩阵;学习方法主要可以利用离线示教和神经网络方法得到雅可比矩阵。
结论
本文分析了机器人视觉伺服系统的基本原理,并设计了基于TMS320C6201和可编程逻辑器件FPGA协处理结构的视觉系统,实现了图像采集和图像目标的实时处理。在实验室中我们利用所设计的视觉系统构建了实验平台,通过实验验证了所设计的视觉系统满足机器人视觉伺服系统的实时要求。
本文作者创新点:对于机器人视觉伺服系统,实时性问题一直是一个难以解决的重要问题。本文创新采用TMS320C6201芯片来实现机器人视觉伺服的图像处理,并采用FPGA协处理,提高了图像处理速度,实验验证了所设计系统满足机器人视觉伺服的实时要求,具有广泛的工业应用前景。
机器人 机器视觉 DSP MIPS 总线 电路 FPGA 神经网络 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)