基于Zigbee技术的全方位移动机器人本体设计
时间:11-24
来源:互联网
点击:
1.引言
1998年日本东京大学井上研究所提出的“远程脑”[1-2]概念,是移动机器人控制体系结构的进步。近年来,移动机器人的应用领域和应用范围正逐渐拓宽,全方位移动机器人由于具有平面运动的全部三个自由度,理论上可以在任何角度以任何速度在机器人所处平面上运动,因此具有广阔的应用前景和良好的社会效益。本文在远程脑的基础上,提出了远程小脑的概念,将远程脑概念分为远程大脑和远程小脑两部分。远程大脑同样安装在机器人体外,远程小脑则安装在机器人体内,两者之间以及机器人之间采用Zigbee模块构建通讯网络。这样,远程大脑控制远程小脑,向远程小脑下达各项指令和命令,再由远程小脑控制机器人体内的各个功能模块,指挥机器人完成各项任务,并且机器人之间可以通过Zigbee组网,实现信息交换和资源共享。
2.全方位移动机器人本体设计
基于远程脑的类人机器人本体采用模块化设计,其结构框图如图1所示,包括智能模块(小脑)、无线通讯模块、机械手控制及驱动模块、车体运动控制及驱动模块、传感器信号采集及处理模块、语音模块等。
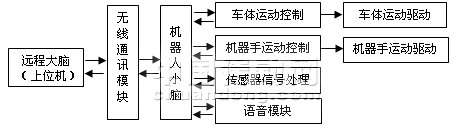
图1机器人本体结构框图
2.1无线通讯模块
由于机器人大小脑分离,且机器人有一定的活动范围,因此,本设计采用无线通信模块进行远程大脑和机器人小脑之间的信息传输,省掉了通信线缆,便于机器人移动。远程大脑处理操作者的命令,并将处理后的控制指令进行编码后,通过无线传输模块发送到小脑,小脑接收命令后,经过分析、判断,将分解的指令传送至各运动模块的控制器,同时小脑将采集的各种信息编码后通过无线通讯模块传送至大脑。考虑到远程大脑和小脑之间命令传输的准确性、快速性以及通讯距离的远近等要求,本设计选用了Chipcon公司的基于ZigBee协议的CC2420EM射频模块。ZigBee是一种新型的短距离无线接入技术,与蓝牙相比,它具有低成本、低功耗、组网方便、可实现自路由功能和数据的可靠传输等优点。CC2420是Chipcon公司推出的首款基于ZigBee技术的射频收发器。它只需极少数外部元器件,性能稳定且功耗极低,可确保短距离通信的有效性和可靠性。利用此芯片开发的无线通信设备支持数据传输率高达250kbps,可以实现多点对多点的快速组网。CC2420EM模块集成了CC2420及其所需的外围电路。机器人小脑与射频模块的具体接口电路如图2所示。单片机通过4线SPI总线(STE1、SIMO1、SOMI1、UCLK1)控制和设置芯片的工作模式,并实现读/写缓存数据,读/写状态寄存器等。通过控制FIFO和FIFOP引脚接口的状态可设置发射/接收缓存器,FIFOP引脚必须连接到单片机的中断引脚。通过CCA引脚状态可以得到空闲信道估计。通过SFD引脚状态可以得到发射帧和接收帧的定时信息从而判断系统的工作状态,SFD引脚应该接到单片机的时钟捕捉引脚。
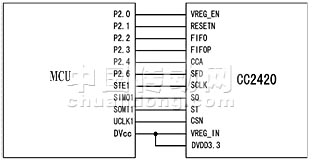
图2单片机与CC2420的接口电路
2.2车体运动控制及驱动模块
本文所研究的行走载体,由麦卡纳姆轮系(Mecanumwheels)构成。麦卡纳姆轮系是移动机器人中常用的全方位移动机构,它可沿任意平面方向灵活运动,尤其具有左右横移和原地仅以自身半径转动的独一无二的功能[6-7]。
车体采用四轮移动机构,四个麦卡纳姆车轮分别由四个直流电机独立驱动,通过对这四个电机转速的控制,就可以实现其横向、纵向、绕自身中心旋转以及斜向等移动。每个麦卡纳姆车轮由两部分组成:主动的轮毂和轮毂外缘按一定倾斜方向均匀分布的多个被动滚轮组成。

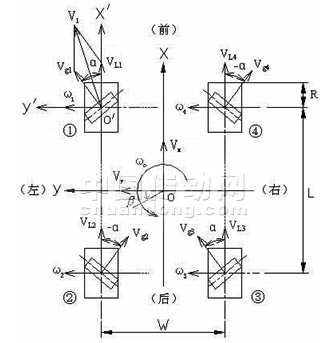
图3麦卡纳姆车轮结构与速度示意图
该机器人运动控制的核心为一块Atmega128。每个麦卡纳姆车轮由一台直流电机配合减速器独立驱动,每个电机由4个功率器件VMOS(IRLZ44N)组成桥式电路,为了获得较好的动态性能和低速的平稳性,故采用H型PWM调速方式,同时实现了正、反转运行以及制动。
2.3机械手控制及驱动模块
机械手部分采用专门的两块模块分别控制两个机械手。驱动模块控制机械手的动作,位姿检测装置实时检测动作关节的位置与姿态,反馈给小脑,小脑判断是否完成用户指令。当没有完成用户指令时,继续执行用户指令;当已经完成用户指令时,机器人小脑通过无线传输模块通知远程脑已经完成用户指令。
2.4传感器信号采集及处理模块
对于机器人而言,传感器就像它的眼、耳、鼻,能够帮助机器人正确分辨它所处的环境,为机器人顺利完成自己的工作提供帮助。传感器的数量和种类很多,本文根据设计需要,采用了探底光电传感器、探边光电传感器和超声波测距传感器。机器人上所有传感器由一单独的单片机进行控制采集,并通过小脑实时向上位机发送信息。当上位机发出指令使机器人向某个方向运动时,会同时发给传感器模块对应信息,则传感器模块会查询对应方向的传感器信号,并及时将其反馈给上位机进行处理,当出现紧急情况,如将要撞到墙壁或物体,则传感器模块会首先发给车体控制模块一个中断信号,使其停车,然后再反馈上位机进行处理,并继续查询。各传感器有效距离如表1所示。
表1所用传感器的有效距离

2.5语音模块
从人性化设计方面考虑,本设计增加了语音模块,这样在遇到人员阻挡或者是遇到障碍的时候,机器人可以根据上位机指令要求或外部输入信号发出的要求,通过语言模块发出警报,通知操作者或提示障碍源,从而避免发生事故。机器人语音模块结构如图4所示。

图4语音模块结构框图图5全方位移动机器人实物图
1998年日本东京大学井上研究所提出的“远程脑”[1-2]概念,是移动机器人控制体系结构的进步。近年来,移动机器人的应用领域和应用范围正逐渐拓宽,全方位移动机器人由于具有平面运动的全部三个自由度,理论上可以在任何角度以任何速度在机器人所处平面上运动,因此具有广阔的应用前景和良好的社会效益。本文在远程脑的基础上,提出了远程小脑的概念,将远程脑概念分为远程大脑和远程小脑两部分。远程大脑同样安装在机器人体外,远程小脑则安装在机器人体内,两者之间以及机器人之间采用Zigbee模块构建通讯网络。这样,远程大脑控制远程小脑,向远程小脑下达各项指令和命令,再由远程小脑控制机器人体内的各个功能模块,指挥机器人完成各项任务,并且机器人之间可以通过Zigbee组网,实现信息交换和资源共享。
2.全方位移动机器人本体设计
基于远程脑的类人机器人本体采用模块化设计,其结构框图如图1所示,包括智能模块(小脑)、无线通讯模块、机械手控制及驱动模块、车体运动控制及驱动模块、传感器信号采集及处理模块、语音模块等。
图1机器人本体结构框图
2.1无线通讯模块
由于机器人大小脑分离,且机器人有一定的活动范围,因此,本设计采用无线通信模块进行远程大脑和机器人小脑之间的信息传输,省掉了通信线缆,便于机器人移动。远程大脑处理操作者的命令,并将处理后的控制指令进行编码后,通过无线传输模块发送到小脑,小脑接收命令后,经过分析、判断,将分解的指令传送至各运动模块的控制器,同时小脑将采集的各种信息编码后通过无线通讯模块传送至大脑。考虑到远程大脑和小脑之间命令传输的准确性、快速性以及通讯距离的远近等要求,本设计选用了Chipcon公司的基于ZigBee协议的CC2420EM射频模块。ZigBee是一种新型的短距离无线接入技术,与蓝牙相比,它具有低成本、低功耗、组网方便、可实现自路由功能和数据的可靠传输等优点。CC2420是Chipcon公司推出的首款基于ZigBee技术的射频收发器。它只需极少数外部元器件,性能稳定且功耗极低,可确保短距离通信的有效性和可靠性。利用此芯片开发的无线通信设备支持数据传输率高达250kbps,可以实现多点对多点的快速组网。CC2420EM模块集成了CC2420及其所需的外围电路。机器人小脑与射频模块的具体接口电路如图2所示。单片机通过4线SPI总线(STE1、SIMO1、SOMI1、UCLK1)控制和设置芯片的工作模式,并实现读/写缓存数据,读/写状态寄存器等。通过控制FIFO和FIFOP引脚接口的状态可设置发射/接收缓存器,FIFOP引脚必须连接到单片机的中断引脚。通过CCA引脚状态可以得到空闲信道估计。通过SFD引脚状态可以得到发射帧和接收帧的定时信息从而判断系统的工作状态,SFD引脚应该接到单片机的时钟捕捉引脚。
图2单片机与CC2420的接口电路
2.2车体运动控制及驱动模块
本文所研究的行走载体,由麦卡纳姆轮系(Mecanumwheels)构成。麦卡纳姆轮系是移动机器人中常用的全方位移动机构,它可沿任意平面方向灵活运动,尤其具有左右横移和原地仅以自身半径转动的独一无二的功能[6-7]。
车体采用四轮移动机构,四个麦卡纳姆车轮分别由四个直流电机独立驱动,通过对这四个电机转速的控制,就可以实现其横向、纵向、绕自身中心旋转以及斜向等移动。每个麦卡纳姆车轮由两部分组成:主动的轮毂和轮毂外缘按一定倾斜方向均匀分布的多个被动滚轮组成。
图3麦卡纳姆车轮结构与速度示意图
该机器人运动控制的核心为一块Atmega128。每个麦卡纳姆车轮由一台直流电机配合减速器独立驱动,每个电机由4个功率器件VMOS(IRLZ44N)组成桥式电路,为了获得较好的动态性能和低速的平稳性,故采用H型PWM调速方式,同时实现了正、反转运行以及制动。
2.3机械手控制及驱动模块
机械手部分采用专门的两块模块分别控制两个机械手。驱动模块控制机械手的动作,位姿检测装置实时检测动作关节的位置与姿态,反馈给小脑,小脑判断是否完成用户指令。当没有完成用户指令时,继续执行用户指令;当已经完成用户指令时,机器人小脑通过无线传输模块通知远程脑已经完成用户指令。
2.4传感器信号采集及处理模块
对于机器人而言,传感器就像它的眼、耳、鼻,能够帮助机器人正确分辨它所处的环境,为机器人顺利完成自己的工作提供帮助。传感器的数量和种类很多,本文根据设计需要,采用了探底光电传感器、探边光电传感器和超声波测距传感器。机器人上所有传感器由一单独的单片机进行控制采集,并通过小脑实时向上位机发送信息。当上位机发出指令使机器人向某个方向运动时,会同时发给传感器模块对应信息,则传感器模块会查询对应方向的传感器信号,并及时将其反馈给上位机进行处理,当出现紧急情况,如将要撞到墙壁或物体,则传感器模块会首先发给车体控制模块一个中断信号,使其停车,然后再反馈上位机进行处理,并继续查询。各传感器有效距离如表1所示。
表1所用传感器的有效距离
2.5语音模块
从人性化设计方面考虑,本设计增加了语音模块,这样在遇到人员阻挡或者是遇到障碍的时候,机器人可以根据上位机指令要求或外部输入信号发出的要求,通过语言模块发出警报,通知操作者或提示障碍源,从而避免发生事故。机器人语音模块结构如图4所示。
图4语音模块结构框图图5全方位移动机器人实物图
机器人 传感器 ZigBee 射频 蓝牙 收发器 电路 单片机 总线 PWM 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)