机器人视觉识别技术简介
时间:09-25
来源:互联网
点击:
二、阈值确定和色彩判断
在确定阈值时,首先通过采集样本进行训练,从而得到预定的几种颜色在YUV空间的分量的上下阈值,如图2所示。
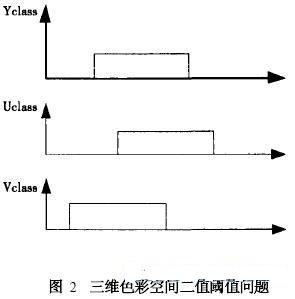
当一个待判定的像素在色彩空间中的位置落在这个长方体中时,就认为该像素属于要找的颜色,从而完成对图像颜色的识别。在Y空间中,Y值表示亮度,因它的变化很大,所以只考虑了U和V的值,在进行颜色判断时,首先分别建立U、V的阈值向量。
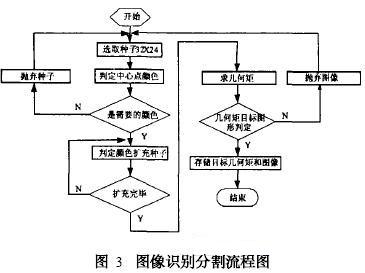
在颜色识别后进行图像分割,在图像分割中采用了种子填充算法,其整个种子的填充是和像素点的颜色同时进行的,一开始不是对所有的像素进行处理,而是分块进行的。当中心点是所要识别的颜色时,就以这个点为种子向四周扩散,并判定周围像素点的颜色,直到填满整个块。
在确定阈值时,首先通过采集样本进行训练,从而得到预定的几种颜色在YUV空间的分量的上下阈值,如图2所示。
当一个待判定的像素在色彩空间中的位置落在这个长方体中时,就认为该像素属于要找的颜色,从而完成对图像颜色的识别。在Y空间中,Y值表示亮度,因它的变化很大,所以只考虑了U和V的值,在进行颜色判断时,首先分别建立U、V的阈值向量。
在颜色识别后进行图像分割,在图像分割中采用了种子填充算法,其整个种子的填充是和像素点的颜色同时进行的,一开始不是对所有的像素进行处理,而是分块进行的。当中心点是所要识别的颜色时,就以这个点为种子向四周扩散,并判定周围像素点的颜色,直到填满整个块。
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)