语意识别与智能机器人设计
时间:08-31
来源:互联网
点击:
语音识别技术以语言为研究对象,涉及生理学、语言学、计算机及信号处理等多个领域,是语言信号处理的一个重要研究方向,在智能控制、多媒体、人机对话等方面有着极其广泛的应用前景。
1 语音识别技术
语音识别技术首先要提取语音特征参量,也就是从语言信号中提取语音识别的有用信息。语音特征参量的提取要考虑单词选定位置的基音、鼻辅音的频谱、元音的频谱、擦音的频谱等要素。语音识别技术也必须有模式匹配及模型训练技术,其中主要包括动态时间规整技术、HMM模型和人工神经网络。时间规整是把一个单词内的时变特征变为一致的过程,在时间规整过程中,作为单词的时间轴要不均匀的扭曲或弯曲,使其行征为模型特征对正,该技术是一种有力的矫正措施,对提高系统的识别精度极为有效。人工神经网络是一个自适应非线性动力学系统,模拟人体大脑活动的基本原理,具有学习、技艺、判断、对比和概括等能力。另外,语音识别单元的选取也是语音识别的重要一步,语言识别单元有单词、音节和音素。对于汉语而言,主要选取音节单元,因为汉语是单音节结构的语言,而英语是多音节的语言,汉语约有400个音节,数量相对较少,便于识别。
2 AP7003型语音识别电路
AP7003是一款低成本语音识别专用集成电路,内置麦克风放大器、A/D转换器、语音处理器和I/O控制器,经预处理后可识别12组不同的字词,每组1.5s时长,可连词或单词识别。可广泛应用于玩具、识别转控和自动答录等领域。
AP7003的功能框图如图1所示。表1给出AP7003的引脚功能。
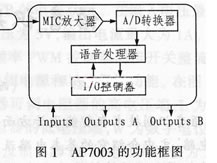
表1 AP7003的引脚功能

AP7003的主要特征如下:
·内置麦克风放大器
·内置A/D转换器
·采用DIP40双列直插式封装
·能识别12组1.5s时长字词
·I/O:2个普通输入,4个触发输入,2个输出口分别有4个、12个输出,2个LED驱动
AP7003具有二种工作模式,即录音模式和识别模式,在进入识别模式之前,应先将目标词录入电路内。在AP7003内有12个存贮体用于存贮12组不同的字句,每个存贮体可存贮1.5s时长的字句,可通过键盘或按程序编制的顺序选择存贮体来录入及存放目标词。语音可通过外部麦克风或其他媒体录入电路内,经内部处理后以不同的数字特征信号保存在存贮体中。
目标词录入电路内后即可将工作模式转换到识别模式,工作时电路将当前语音与事先录入存贮体的目标词语音相比较,如果语音特征相匹配,则在电路的相应输出端输出高电平或低电平。
3 声控机器人设计
语音识别电路广泛应用在智能控制中,把这种电路应用在智能机器人设计中,使机器人初步具有与人对话的能力,且机器人的操作具有普遍性,极大地提高了操作者的兴趣,图2是机器人电路的主要原理框图。
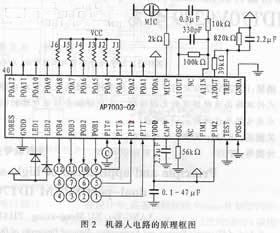
图2中按键的定义如表2所示。上电后12个存贮器在录入目标词之前必须清空,开始录入目标词时使LED1有效,录入后电路将进入识别模式。
表2 按键的定义

如果由麦克风录入的单词与存储器原有单词相匹配,对应的POA输出口有效,并驱动断电器器,电机运动。在本设计中,机器人主要有“前进”(J1)、“后退”(J2)、“左转”(J3)、“右转”(J4)、“举起”(J5)、“放下”(J6)、“停止” 等几种动作。其中,“停止”定义为clearOutput,其他依次定义为POA3、POA4、POA5、POA6、POA7和POA8。以“前进” (J1)和“后退”(J2)为例,如图3所示。
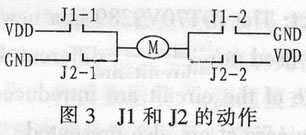
当“停止”时,清除POA所有状态,机器人停止。
当然,语音识别电路对外部麦克风(MIC)的分贝值有一定的要求,经验表明在本语音识别电路中选用56dB的麦克风较好。另外,AP7003的工作电压为 2.4~4.5V,如果您的应用系统是5V工作电压,那么,通过一个二极管给AP7003供电,可以保证系统能长期稳定、可靠的工作,也有利于降低系统功耗。
4 结束语
在实际应用的过程中,麦克风的分贝值、Set R_Level匹配度的设置对于语音识别的效果影响较大。如果这二个参数设置合理,该电路可具有较高的识别率,一般可达80%以上,不失为一种效好的语音识别电路。
1 语音识别技术
语音识别技术首先要提取语音特征参量,也就是从语言信号中提取语音识别的有用信息。语音特征参量的提取要考虑单词选定位置的基音、鼻辅音的频谱、元音的频谱、擦音的频谱等要素。语音识别技术也必须有模式匹配及模型训练技术,其中主要包括动态时间规整技术、HMM模型和人工神经网络。时间规整是把一个单词内的时变特征变为一致的过程,在时间规整过程中,作为单词的时间轴要不均匀的扭曲或弯曲,使其行征为模型特征对正,该技术是一种有力的矫正措施,对提高系统的识别精度极为有效。人工神经网络是一个自适应非线性动力学系统,模拟人体大脑活动的基本原理,具有学习、技艺、判断、对比和概括等能力。另外,语音识别单元的选取也是语音识别的重要一步,语言识别单元有单词、音节和音素。对于汉语而言,主要选取音节单元,因为汉语是单音节结构的语言,而英语是多音节的语言,汉语约有400个音节,数量相对较少,便于识别。
2 AP7003型语音识别电路
AP7003是一款低成本语音识别专用集成电路,内置麦克风放大器、A/D转换器、语音处理器和I/O控制器,经预处理后可识别12组不同的字词,每组1.5s时长,可连词或单词识别。可广泛应用于玩具、识别转控和自动答录等领域。
AP7003的功能框图如图1所示。表1给出AP7003的引脚功能。
表1 AP7003的引脚功能
AP7003的主要特征如下:
·内置麦克风放大器
·内置A/D转换器
·采用DIP40双列直插式封装
·能识别12组1.5s时长字词
·I/O:2个普通输入,4个触发输入,2个输出口分别有4个、12个输出,2个LED驱动
AP7003具有二种工作模式,即录音模式和识别模式,在进入识别模式之前,应先将目标词录入电路内。在AP7003内有12个存贮体用于存贮12组不同的字句,每个存贮体可存贮1.5s时长的字句,可通过键盘或按程序编制的顺序选择存贮体来录入及存放目标词。语音可通过外部麦克风或其他媒体录入电路内,经内部处理后以不同的数字特征信号保存在存贮体中。
目标词录入电路内后即可将工作模式转换到识别模式,工作时电路将当前语音与事先录入存贮体的目标词语音相比较,如果语音特征相匹配,则在电路的相应输出端输出高电平或低电平。
3 声控机器人设计
语音识别电路广泛应用在智能控制中,把这种电路应用在智能机器人设计中,使机器人初步具有与人对话的能力,且机器人的操作具有普遍性,极大地提高了操作者的兴趣,图2是机器人电路的主要原理框图。
图2中按键的定义如表2所示。上电后12个存贮器在录入目标词之前必须清空,开始录入目标词时使LED1有效,录入后电路将进入识别模式。
表2 按键的定义
如果由麦克风录入的单词与存储器原有单词相匹配,对应的POA输出口有效,并驱动断电器器,电机运动。在本设计中,机器人主要有“前进”(J1)、“后退”(J2)、“左转”(J3)、“右转”(J4)、“举起”(J5)、“放下”(J6)、“停止” 等几种动作。其中,“停止”定义为clearOutput,其他依次定义为POA3、POA4、POA5、POA6、POA7和POA8。以“前进” (J1)和“后退”(J2)为例,如图3所示。
当“停止”时,清除POA所有状态,机器人停止。
当然,语音识别电路对外部麦克风(MIC)的分贝值有一定的要求,经验表明在本语音识别电路中选用56dB的麦克风较好。另外,AP7003的工作电压为 2.4~4.5V,如果您的应用系统是5V工作电压,那么,通过一个二极管给AP7003供电,可以保证系统能长期稳定、可靠的工作,也有利于降低系统功耗。
4 结束语
在实际应用的过程中,麦克风的分贝值、Set R_Level匹配度的设置对于语音识别的效果影响较大。如果这二个参数设置合理,该电路可具有较高的识别率,一般可达80%以上,不失为一种效好的语音识别电路。
神经网络 电路 集成电路 放大器 LED 机器人 智能机器人 电压 二极管 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 无线机器人的进化(02-23)
- 一种视觉导航机器人的设计(03-22)
- 精密运动控制器LM628的应用设计(06-20)
- 基于神经网络电机速度控制器的SOPC系统(06-02)
- 基于多传感器信息融合的移动机器人导航综述(10-28)