基于PLC的防爆机器人系统的控制
时间:07-09
来源:互联网
点击:
移动机器人由于具有优越的机动性和灵活性而备受青睐,在许多场合投入实际应用,如核工业检测,消防、火场检测,有毒、易燃、易爆气体场所探测,采矿、星球探测及无人战场等。为了适应不同环境下的应用,移动机器人控制系统的硬件和软件结构也不相同。本文涉及到的移动机器人是应用在防爆系统中,控制系统要求高稳定性、可靠性和实时性,采用西门子的S7-200系列的PLC作为控制器对其进行控制是一种既经济又能充分满足设计要求的有效方法。 1移动机器人控制系统的硬件设计
1.1 控制系统组成及PLG控制原理
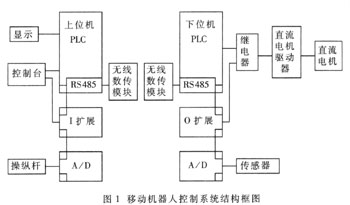
一般的控制系统采用工控机控制整个系统的工作,工控机工作可靠、控制准确、使用方便。防爆机器人一般工作在室外环境和野外环境,工作环境恶劣。作为移动机器人,整个控制系统要求尽量轻便,这时若采用工控机则整个系统不够方便、灵活。PLC具有良好的稳定性、结构轻巧,采用两个PLC作为上、下位机,则系统轻巧灵活。根据操作和控制要求,控制系统选用西门子公司的S7-200系列的PLC,该PLC可以满足多种多样的自动化控制需要。由于具有紧凑的设计、良好的扩展性、低廉的价格以及强大功能的指令,使得整个控制系统的性价比大大提高,操作也简单易行;同时,系统的可靠性、稳定性和控制的准确性也得到了保证。控制系统结构如图1所示。
此防爆机器人的控制系统主要由上、下位机两部分组成。上位机PLC(CPU224)用于整个系统的启停控制,控制台上为一系列控制按钮,控制台将希望的机器人的动作传到上位机的PLC和上位I扩展模块(EM221)里,操纵杆将电位器的位置通过PLC的扩展A/D模块(EM231)将模拟量转化为数字量,通过上位PLC和下位PLC(CPU224)的通讯,将这些数据传输到下位PLC。同时,上位机接收来自下位机的温度、位置、角度等状态信息。为了将这些数据显示,选用性价比较高的数码管与上位PLC进行相应的连接,然后将这些数据准确地显示出来。防爆机器人机体上的摄像头将机器人工作现场的画面传送到控制台的显示器上,在显示器上实时反映机器人的工作状态,便于操作者根据实际情况控制排爆机器人的动作。
下位机的PLC一方面接收上位机传过来的指令,并和O扩展模块(EM222)一起通过继电器组对直流电机驱动器进行控制而对相应的直流电机动作进行控制,完成操作者希望的机器人的动作;另一方面,从工作现场采集到温度、位置、角度等模拟信号,通过模拟量扩展模块(EM231)将其模拟量转换为数字量。通过与上位机PLC的通讯,将这些数据传送到上位PLC上。
1.2 数据信号传输媒介
数据信号传输媒介多用光缆和电缆,光缆传输容量大,传输距离长,抗电磁干扰能力强,但是对安装技术要求高,并且价格相对昂贵。电缆作为信号传输媒介,价格便宜,安装方便,数据传输准确、快速,但是有线通讯有许多局限性,例如整个系统由于电缆的存在而不够灵活。
在实际使用过程中,为了解决有线通讯的局限性,采用无线数传模块进行数据信号的传输。无线数传模块体积小、使用方便,但是数据传输的误码率比较高,易受电磁干扰。这里采用的TDX-1000无线通信模块包括无线接收、发射、FSK调制方式,并采用前向纠错信道编码技术,提高了数据抗突发干扰和随机干扰的能力。接口方式是5V TTL电平兼容接口,无线通信模块是半双工的,收/发的切换通过收发控制信号线实现。
2 软件系统的设计
2.1 控制系统控制流程
控制系统的控制流程如图2所示。
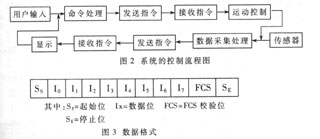
系统的控制过程为:用户将希望的机器人的动作作为指令输入到控制面板上,PLC对这些指令进行处理,转换为数据,发送到下位PLC上;下位PLC接收到上位PLC的数据后,将这些数据转换为控制信号,控制机器人体上的直流电机,完成相应的机器人动作。与此同时,下位机采集由传感器发来的现场信号,并进行处理,从而转换成数据传送到上位机上;上位机接收下位机发来的现场的数据,通过数码管将这些数据显示出来。
2.2 数据传输格式
S7-200系列产品的通信模式有两种:一种是点对点通讯协议,用于S7-200与其编程器或西门子公司的人-机接口产品之间的通讯;另一种是对用户完全开放的自由口模式,用户根据实际系统的应用要求,自行规定通讯协议。本系统是两个PLC之间进行通讯,使用自由口通讯协议。上、下位机PLC之间的通讯数据传输的波特率为9600bps,奇校验,数据的格式是1位起始位、8位数据位、1位FCS校验位、1位停止位。数据格式如图3所示。
2.3 控制系统的程序流程
根据移动机器人工作的要求,确定机器人各个电机工作的相互关系,画出程序流程图,再由PLC的输入输出的逻辑关系编写梯形图。其上、下位机的程序流程图如图4(a)、(b)所示。限于篇幅,各子程序的流程图本文不再给出。
1.1 控制系统组成及PLG控制原理
一般的控制系统采用工控机控制整个系统的工作,工控机工作可靠、控制准确、使用方便。防爆机器人一般工作在室外环境和野外环境,工作环境恶劣。作为移动机器人,整个控制系统要求尽量轻便,这时若采用工控机则整个系统不够方便、灵活。PLC具有良好的稳定性、结构轻巧,采用两个PLC作为上、下位机,则系统轻巧灵活。根据操作和控制要求,控制系统选用西门子公司的S7-200系列的PLC,该PLC可以满足多种多样的自动化控制需要。由于具有紧凑的设计、良好的扩展性、低廉的价格以及强大功能的指令,使得整个控制系统的性价比大大提高,操作也简单易行;同时,系统的可靠性、稳定性和控制的准确性也得到了保证。控制系统结构如图1所示。
|
此防爆机器人的控制系统主要由上、下位机两部分组成。上位机PLC(CPU224)用于整个系统的启停控制,控制台上为一系列控制按钮,控制台将希望的机器人的动作传到上位机的PLC和上位I扩展模块(EM221)里,操纵杆将电位器的位置通过PLC的扩展A/D模块(EM231)将模拟量转化为数字量,通过上位PLC和下位PLC(CPU224)的通讯,将这些数据传输到下位PLC。同时,上位机接收来自下位机的温度、位置、角度等状态信息。为了将这些数据显示,选用性价比较高的数码管与上位PLC进行相应的连接,然后将这些数据准确地显示出来。防爆机器人机体上的摄像头将机器人工作现场的画面传送到控制台的显示器上,在显示器上实时反映机器人的工作状态,便于操作者根据实际情况控制排爆机器人的动作。
下位机的PLC一方面接收上位机传过来的指令,并和O扩展模块(EM222)一起通过继电器组对直流电机驱动器进行控制而对相应的直流电机动作进行控制,完成操作者希望的机器人的动作;另一方面,从工作现场采集到温度、位置、角度等模拟信号,通过模拟量扩展模块(EM231)将其模拟量转换为数字量。通过与上位机PLC的通讯,将这些数据传送到上位PLC上。
1.2 数据信号传输媒介
数据信号传输媒介多用光缆和电缆,光缆传输容量大,传输距离长,抗电磁干扰能力强,但是对安装技术要求高,并且价格相对昂贵。电缆作为信号传输媒介,价格便宜,安装方便,数据传输准确、快速,但是有线通讯有许多局限性,例如整个系统由于电缆的存在而不够灵活。
在实际使用过程中,为了解决有线通讯的局限性,采用无线数传模块进行数据信号的传输。无线数传模块体积小、使用方便,但是数据传输的误码率比较高,易受电磁干扰。这里采用的TDX-1000无线通信模块包括无线接收、发射、FSK调制方式,并采用前向纠错信道编码技术,提高了数据抗突发干扰和随机干扰的能力。接口方式是5V TTL电平兼容接口,无线通信模块是半双工的,收/发的切换通过收发控制信号线实现。
2 软件系统的设计
2.1 控制系统控制流程
控制系统的控制流程如图2所示。
|
系统的控制过程为:用户将希望的机器人的动作作为指令输入到控制面板上,PLC对这些指令进行处理,转换为数据,发送到下位PLC上;下位PLC接收到上位PLC的数据后,将这些数据转换为控制信号,控制机器人体上的直流电机,完成相应的机器人动作。与此同时,下位机采集由传感器发来的现场信号,并进行处理,从而转换成数据传送到上位机上;上位机接收下位机发来的现场的数据,通过数码管将这些数据显示出来。
2.2 数据传输格式
S7-200系列产品的通信模式有两种:一种是点对点通讯协议,用于S7-200与其编程器或西门子公司的人-机接口产品之间的通讯;另一种是对用户完全开放的自由口模式,用户根据实际系统的应用要求,自行规定通讯协议。本系统是两个PLC之间进行通讯,使用自由口通讯协议。上、下位机PLC之间的通讯数据传输的波特率为9600bps,奇校验,数据的格式是1位起始位、8位数据位、1位FCS校验位、1位停止位。数据格式如图3所示。
2.3 控制系统的程序流程
根据移动机器人工作的要求,确定机器人各个电机工作的相互关系,画出程序流程图,再由PLC的输入输出的逻辑关系编写梯形图。其上、下位机的程序流程图如图4(a)、(b)所示。限于篇幅,各子程序的流程图本文不再给出。
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)