基于FPGA的移位寄存器流水线结构FFT处理器
时间:11-09
来源:互联网
点击:
3 具体模块的设计
3.1 控制与地址产生模块
由于两路数据同时输入,为了防止发生两路数据间的串扰,对数据的控制显得极其关键。从上面的算法结构分析中知道,由于后级的DFT运算点数是前一级的一半,所以后一级的开关转换周期也是前一级的一半,基于这种关系,可以使用一个8位计数器的每一位状态来对各级开关进行控制。最高位控制第一级,同时由于上一级数据进入下一级需要一个时钟,所以下一级的开关转换时刻要比上一级延迟一个时钟周期。
对于移位寄存器,在实现时,各级的前级移位寄存器深度为N/2-1,从本质而言,是使运算开始的时钟上升沿到来时,数据已经出现在碟算模块输入线上,而不需要下一个时钟的驱动来移出寄存器,比如第二级移位寄存器的级数为63。这样,运算周期正好是2的倍数,从而方便使用计数器的各位直接对开关进行控制。
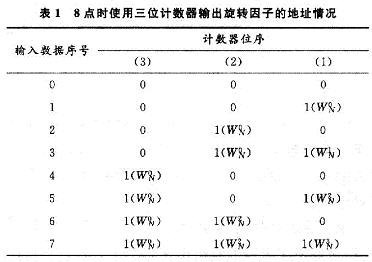
同时,计数器还可以用来产生所需旋转因子的RAM地址。根据各级蝶形运算所需旋转因子的规律,可以利用计数器的高位补零来产生查找表的地址。比如,对于第一级,因为需要在最低位第一次出现1时提供,第二次出现1时提供,…,以此类推,周期为128,所以可以使用计数器的低七位作为地址。对于第二级,由于所需要的地址为偶数,可以由计数器的[6:1]和最低位置O产生。表l为8点时使用三位计数器输出旋转因子的地址情况。
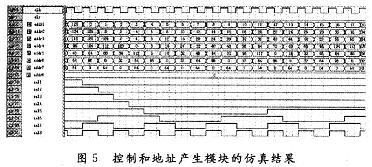
控制和地址产生模块的仿真结果如图5所示,其中sel代表开关控制,addr代表产生的地址。
3.2 蝶形运算模块
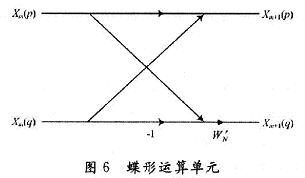
蝶算模块由一个复数加法器,一个复数减法器和一个旋转因子的复数乘法器构成,如图6所示。
旋转因子乘法器通常由4次实数乘法和2次加/减法运算实现,但因为cos和sin的值可以预先存储,通过下面的算法可以简化复数乘法器:
(1)存储如下三个系数:C,C+S,C-S
(2)计算:E=X-Y和Z=C*E=C*(X-Y)
(3)用R=(C-S)*Y+Z,I=(C+S)*X-Z,
得到需要的结果。
这种算法使用了3次乘法,1次加法和2次减法,但是需要使用存储3个表的ROM资源。
设计中数据的输入为16位复数,所以将旋转因子cos(2kπ/N),sin(2kπ/N)量化成带符号数的16位二进制数后,存储到ROM中,由于值域不同,需要注意C+S和C-S的表要比C表多1位精度。
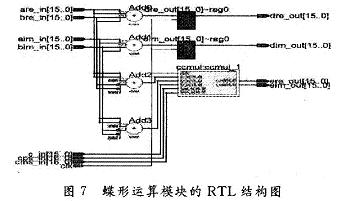
运算后的结果需要除以量化时乘以的倍数16b011111llllllllll。具体实现时由于除法运算在FPGA器件需要消耗较多的资源,设计中采用二进制数移位的方法来实现除法运算。为了防止数据溢出,设计对输出结果除以2。图7为蝶形运算模块的RTL级结构图。
3.3 倒序输出模块
由频域抽取的基-2算法可知,运算结果需要倒序输出。可以先将结果存储到RAM中,然后使用O~255的二进制数倒序产生RAM读取地址,依次将结果读出,其中实现一个8位二进制数倒序的算法如下:
(1)将8位数字的相邻两位交换位置;
(2)将相邻的两位看作1组,相邻两组交换位置;
(3)将相邻的4位看作1组,相邻两组交换位置。
经过这样的交换位置后,输出即为原来8位二进制数的倒序。
举例对于8位二进制数10110110来说,第一次交换位置的结果是01111001,第二次交换位置的结果是11010110,最后交换位置的结果是01101101。可见正好是原来数字的倒序。
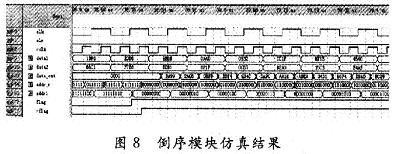
另外,由于设计的是两路数据同时写入,一路数据读出,所以读取的频率是写入频率的2倍,使用PLL实现原始时钟的二倍频,用来读取RAM。倒序模块仿真结果如图8所示。
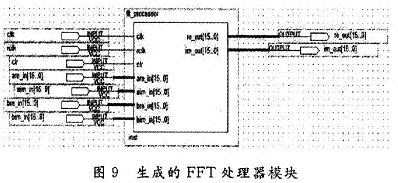
最终生成的FFT处理器模块图如图9所示。
4 仿真结果
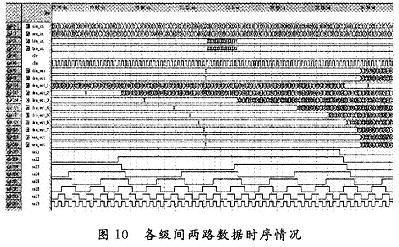
各级间数据时序情况如图10所示,设计的FFT处理器仿真结果如图1l所示。采用一路阶梯递增信号和另一路:XXXX信号进行仿真,通过与Matlab计算结果进行对比,结果基本一致,可以满足系统要求。系统总的延时由延时最大的第一级决定,为第一级运算的延时加上倒序输出的延时,总共是(256+128)×clk,相对于一般流水线结构(256×读入周期+7×128×蝶算周期+128×读入周期),系统延时大为减少。
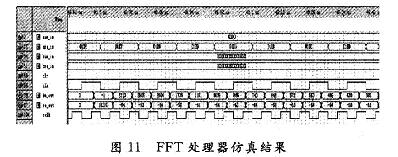
通过仿真可知,系统最大频率由蝶形运算模块的最大工作频率决定。使用QuartusⅡ软件时序仿真后,得到处理器的工作频率为72 MHz。
5 结语
通过采用移位寄存器流水线结构,可以有效地提高FFT处理器中蝶形运算单元的效率,减少寄存器的使用数量,并且简化了地址控制,提高处理器的工作频率,具有良好的可扩展性,同时可以实现两路数据的同时输入,从而增大了一倍的数据吞吐量。对于工作频率要求较高,数据吞吐量较大,尤其对于需要两路数据输入的场合,比如两天线的MIMO-OFDM系统,具有很大的实用价值。
3.1 控制与地址产生模块
由于两路数据同时输入,为了防止发生两路数据间的串扰,对数据的控制显得极其关键。从上面的算法结构分析中知道,由于后级的DFT运算点数是前一级的一半,所以后一级的开关转换周期也是前一级的一半,基于这种关系,可以使用一个8位计数器的每一位状态来对各级开关进行控制。最高位控制第一级,同时由于上一级数据进入下一级需要一个时钟,所以下一级的开关转换时刻要比上一级延迟一个时钟周期。
对于移位寄存器,在实现时,各级的前级移位寄存器深度为N/2-1,从本质而言,是使运算开始的时钟上升沿到来时,数据已经出现在碟算模块输入线上,而不需要下一个时钟的驱动来移出寄存器,比如第二级移位寄存器的级数为63。这样,运算周期正好是2的倍数,从而方便使用计数器的各位直接对开关进行控制。
同时,计数器还可以用来产生所需旋转因子的RAM地址。根据各级蝶形运算所需旋转因子的规律,可以利用计数器的高位补零来产生查找表的地址。比如,对于第一级,因为需要在最低位第一次出现1时提供,第二次出现1时提供,…,以此类推,周期为128,所以可以使用计数器的低七位作为地址。对于第二级,由于所需要的地址为偶数,可以由计数器的[6:1]和最低位置O产生。表l为8点时使用三位计数器输出旋转因子的地址情况。
控制和地址产生模块的仿真结果如图5所示,其中sel代表开关控制,addr代表产生的地址。
3.2 蝶形运算模块
蝶算模块由一个复数加法器,一个复数减法器和一个旋转因子的复数乘法器构成,如图6所示。
旋转因子乘法器通常由4次实数乘法和2次加/减法运算实现,但因为cos和sin的值可以预先存储,通过下面的算法可以简化复数乘法器:
(1)存储如下三个系数:C,C+S,C-S
(2)计算:E=X-Y和Z=C*E=C*(X-Y)
(3)用R=(C-S)*Y+Z,I=(C+S)*X-Z,
得到需要的结果。
这种算法使用了3次乘法,1次加法和2次减法,但是需要使用存储3个表的ROM资源。
设计中数据的输入为16位复数,所以将旋转因子cos(2kπ/N),sin(2kπ/N)量化成带符号数的16位二进制数后,存储到ROM中,由于值域不同,需要注意C+S和C-S的表要比C表多1位精度。
运算后的结果需要除以量化时乘以的倍数16b011111llllllllll。具体实现时由于除法运算在FPGA器件需要消耗较多的资源,设计中采用二进制数移位的方法来实现除法运算。为了防止数据溢出,设计对输出结果除以2。图7为蝶形运算模块的RTL级结构图。
3.3 倒序输出模块
由频域抽取的基-2算法可知,运算结果需要倒序输出。可以先将结果存储到RAM中,然后使用O~255的二进制数倒序产生RAM读取地址,依次将结果读出,其中实现一个8位二进制数倒序的算法如下:
(1)将8位数字的相邻两位交换位置;
(2)将相邻的两位看作1组,相邻两组交换位置;
(3)将相邻的4位看作1组,相邻两组交换位置。
经过这样的交换位置后,输出即为原来8位二进制数的倒序。
举例对于8位二进制数10110110来说,第一次交换位置的结果是01111001,第二次交换位置的结果是11010110,最后交换位置的结果是01101101。可见正好是原来数字的倒序。
另外,由于设计的是两路数据同时写入,一路数据读出,所以读取的频率是写入频率的2倍,使用PLL实现原始时钟的二倍频,用来读取RAM。倒序模块仿真结果如图8所示。
最终生成的FFT处理器模块图如图9所示。
4 仿真结果
各级间数据时序情况如图10所示,设计的FFT处理器仿真结果如图1l所示。采用一路阶梯递增信号和另一路:XXXX信号进行仿真,通过与Matlab计算结果进行对比,结果基本一致,可以满足系统要求。系统总的延时由延时最大的第一级决定,为第一级运算的延时加上倒序输出的延时,总共是(256+128)×clk,相对于一般流水线结构(256×读入周期+7×128×蝶算周期+128×读入周期),系统延时大为减少。
通过仿真可知,系统最大频率由蝶形运算模块的最大工作频率决定。使用QuartusⅡ软件时序仿真后,得到处理器的工作频率为72 MHz。
5 结语
通过采用移位寄存器流水线结构,可以有效地提高FFT处理器中蝶形运算单元的效率,减少寄存器的使用数量,并且简化了地址控制,提高处理器的工作频率,具有良好的可扩展性,同时可以实现两路数据的同时输入,从而增大了一倍的数据吞吐量。对于工作频率要求较高,数据吞吐量较大,尤其对于需要两路数据输入的场合,比如两天线的MIMO-OFDM系统,具有很大的实用价值。
电子 FPGA DSP Altera 仿真 Quartus 相关文章:
- 基于ARM的嵌入式系统中从串配置FPGA的实现(06-09)
- 周立功:如何兼顾学习ARM与FPGA(05-23)
- 初学者如何学习FPGA(08-06)
- 为何、如何学习FPGA(05-23)
- 学习FPGA绝佳网站推荐!!!(05-23)
- 我的FPGA学习历程(05-23)