基于FPGA的步进电机正弦波细分驱动器设计
时间:08-02
来源:互联网
点击:
3.6PWM发生器模块
PWM发生器模块将PI调节后输出的数据转化为PWM波形输出给IGBT模块,通过IGBT的通断切换调整相电压,进而改变相电流按照给定进行变化。PWM波形的生成是通过将给定控制数据和载波数据比较,通过比较二者大小情况确定PWM的高低电平,实现PWM调制,如图11所示。
图11 PWM模块总体框图
锯齿波作为PWM载波,驱动时钟频率为200MHz,14位寄存器宽度。为减少计数器的进位链长度,采用计数器,拆分为3位计数器和11位计数器,减少了组合逻辑延迟。死区保护发生器模块根据给定的死区长度数据,将输入的PWM信号输出为PH和PL信号,分别对应IGBT的上下桥臂,并在PH和PL数据的变沿插入死区保护(同时置为低电平)。插入的死区保护是通过上升计数器和下降计数器来实现的,保证上桥臂和下桥臂不同时导通。
4 仿真
对PWM模块进行功能仿真,仿真波形如图12所示。经分析,六路PWM波满足时序和死区保护的要求,实现了设计所要达到的目。将图12进行放大可见IGBT死区如图13所示。
图12PWM功能仿真波形
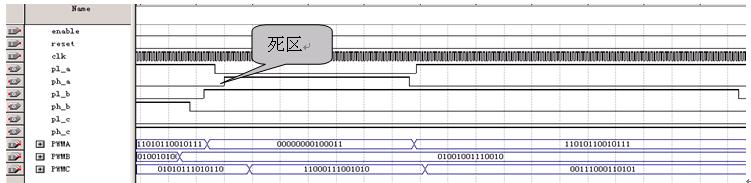
图13IGBT控制信号死区
5 电机运行波形及分析
把FPGA配置好之后,对系统调试电机运行时三相电流波形如图14所示,电机换向时进行反转查表,电机转速反转波形如图15所示。
图14步进电机运行时三相电流
图15步进电机反转时电流波形
实验结果表明步进电机运行时三相电流相位差120度,三相电流为正弦波,电机运行平稳,电机反转时进行反相查表,转换方向时反应时间短,电流波动小。
6 结论
本控制器采用Altera公司嵌入NiosII处理器软核的FPGA实现了步进电机正弦波可变细分控制,大大提高了系统的可靠性,降低了设计成本。
控制部分采用NiosIICPU软核是系统控制更加方便灵活。CPU和各个控制模块集成在单片FPGA内,使驱动器集成度大为提高,减小了驱动器的体积。大大提高了细分精度,实现了步进电机在是低转速下的4096高细分的运行,消除了步进电机存在的低频振荡问题,控制精度显著提高,在高精密数控机床中有广泛的应用前景。
PWM发生器模块将PI调节后输出的数据转化为PWM波形输出给IGBT模块,通过IGBT的通断切换调整相电压,进而改变相电流按照给定进行变化。PWM波形的生成是通过将给定控制数据和载波数据比较,通过比较二者大小情况确定PWM的高低电平,实现PWM调制,如图11所示。
图11 PWM模块总体框图
锯齿波作为PWM载波,驱动时钟频率为200MHz,14位寄存器宽度。为减少计数器的进位链长度,采用计数器,拆分为3位计数器和11位计数器,减少了组合逻辑延迟。死区保护发生器模块根据给定的死区长度数据,将输入的PWM信号输出为PH和PL信号,分别对应IGBT的上下桥臂,并在PH和PL数据的变沿插入死区保护(同时置为低电平)。插入的死区保护是通过上升计数器和下降计数器来实现的,保证上桥臂和下桥臂不同时导通。
4 仿真
对PWM模块进行功能仿真,仿真波形如图12所示。经分析,六路PWM波满足时序和死区保护的要求,实现了设计所要达到的目。将图12进行放大可见IGBT死区如图13所示。
图12PWM功能仿真波形
图13IGBT控制信号死区
5 电机运行波形及分析
把FPGA配置好之后,对系统调试电机运行时三相电流波形如图14所示,电机换向时进行反转查表,电机转速反转波形如图15所示。
图14步进电机运行时三相电流
图15步进电机反转时电流波形
实验结果表明步进电机运行时三相电流相位差120度,三相电流为正弦波,电机运行平稳,电机反转时进行反相查表,转换方向时反应时间短,电流波动小。
6 结论
本控制器采用Altera公司嵌入NiosII处理器软核的FPGA实现了步进电机正弦波可变细分控制,大大提高了系统的可靠性,降低了设计成本。
控制部分采用NiosIICPU软核是系统控制更加方便灵活。CPU和各个控制模块集成在单片FPGA内,使驱动器集成度大为提高,减小了驱动器的体积。大大提高了细分精度,实现了步进电机在是低转速下的4096高细分的运行,消除了步进电机存在的低频振荡问题,控制精度显著提高,在高精密数控机床中有广泛的应用前景。
步进电机 单片机 电路 模拟电路 DSP FPGA 电流 电动机 IGBT PWM LED PCB 二极管 电阻 电压 比较器 仿真 Altera 相关文章:
- 基于FPGA实现的短波发射机自动调谐系统的设计(07-27)
- 用单片机和CPLD实现步进电机的控制(08-06)
- FPGA在短波发射机自动调谐系统中的应用(08-21)
- 运动控制和混合信号FPGA(10-13)
- 装入CPLD/FPGA的步进电机运动控制器与驱动器(11-07)
- 利用可编程逻辑实现高性能的罪犯抓捕系统(11-08)