机器视觉电子电路设计图集锦
即可,开关量输出使用光耦隔离,本设计用的光耦PC817,比较适合DSP 使用。当DSP 输出高电平时继电器吸合,CNETA1 和CNETA2 两脚导通继电器电路图见图:
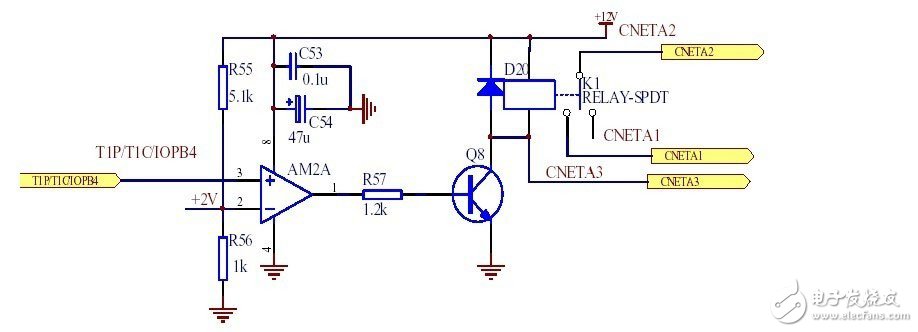
图2 继电器电路图
QEP 电路:DSP 的每个时间管理器都有一个正交编码器脉冲(QEP)电路。当QEP电路被使能时可以对CAP1/QEP1 和CAP2/QEP2(对于EVA 模块)引脚上的正交编码输入脉冲进行解码和计数。正交编码脉冲电路可用于连接光电编码器以获得旋转机械的位置和速率。伺服电机控制器需要使用QEP 电路,由于一个伺服电机控制器需要控制4 台伺服电机,所以码盘信号使用74153 芯片选择输入,同时码盘的每路信号都有正负两根线通过运放放大后再到74153 选择后输入DSP,码盘选择电路见图:

图3 码盘选择电路
本文介绍了机器视觉系统中PWM/电压输出电路、I\O 口电路与QEP 电路设计,使得开发人员可以通过电路介绍将数字技术与摄像头、传感器、电机和其他外设集成来轻松构建 3D 点云。整个机器人车现在可以完成所需功能,同时也完全符合视觉设计要求,达到了相应技术指标,为将来的批量生产奠定了坚实的基础,市场潜力巨大。
智能视觉高速寻线机器人导航系统电路设计
视频采集模块
由于单片机A/D速度限制,需要选用低分辨率的黑白摄像头。因为低分辨率意味着视频单行扫描时间的增加,而黑白摄像头意味着只需要单路A/D就可以完成视频采集工作。选择了Omvision生产的ov5116芯片为内核的CMOS黑白摄像头,分辨率为320×240,图像刷新频率50Hz。同时选用 LM1881视频同步信号分离芯片提取视频信号中的行同步和场同步信号,连入s12的脉冲捕捉通道。通过捕捉信号触发AD模块工作,采集存储视频数据。

图3 视频采集电路原理图
电机控制及电源
RS-380SH直流电机作为主驱动电机,通过PWM信号控制。选用Freescale公司的MC33886全桥驱动芯片,通过两路半桥实现电机正反转。这里的电机反转并不为实现倒车,而主要用于车体减速。在进行电机正反转切换时,电机驱动电流会随着负载增大而瞬间放大,因此需要增大稳压能力,保证系统正常工作电压,避免单片机自动重启。在整个系统中,有多种电压需求,单片机和舵机为5V供电;CMOS摄像头为 6~9V。因此,为了方便开发,这里选用最常用的7.2V充电电池组。只需在系统内加入5V稳压芯片,提供5V电压。
本文设计了一个基于视觉的以高速寻线为目的的行走机器人系统。系统采用一块高性能单片机,完成了从视频采集到视频处理,最终实现速度和转向控制的一套寻线行走功能。系统轻便灵巧,无需存储器扩展和其他可编程器件配合,搭建费用低。该方案在参加第一届全国大学生智能车大赛中,系统运行平稳,取得了非常优异的成绩。
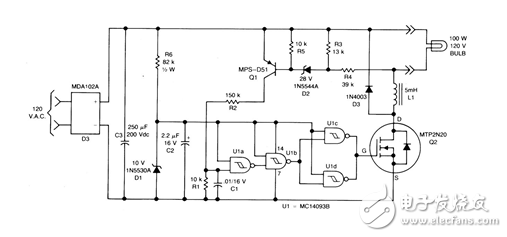
机器视觉照明稳定灯照明电路设计
电路原理:由Q1,Q2和U1组合的磁滞振荡器,可用来稳定灯的照明。在操作时,全波电桥D3既可用于交流线中,或者是灯的未经调节的直流电,又可用于为四CMOS斯密特触发器供电的10V齐纳二极管中。
------------------------------
机器视觉技术资料集锦——让机器视觉产品设计练就慧眼神通!

- 盘点:那些为健康而生的APP与智能硬件(11-24)
- 指尖的密码!手指静脉识别鼠标问世(02-02)
- WLAN射频优化的解决方案设计详解(03-03)
- 智能鞋垫:解决跑步者的膝伤问题(02-12)
- 混合动力汽车系统结构大盘点TOP3(03-14)
- 盘点STM32-NUCLEO开发与仿真平台(03-28)