机器视觉电子电路设计图集锦
TOP1 信号灯的线性LED驱动器电路设计攻略
电路说明:本应用笔记介绍了一款线性LED 驱动方案,用于驱动6串LED 信号灯,每串包含4只串联LED。每串LED 负载具有独立的阳极接点,阴极连接在一起。该电路采用汽车电池供电, 最低电压为10V,最高电压为28V,能够为每串LED 提供350mA 电流。由于使用共阴极架构,检流电阻必须放置在LED 串的阳极端。LED 驱动器(MAX16836)电流检测输入端的最大共模电压限制在4V,因此,检流电阻两端的电压必须经过电平转换,以地为参考,以符合驱动器的要求。一对 PNP 晶体管把LED 检流电阻的电压转换成以GND 为参考的电压,送入MAX16836电流检测引脚。下式提供了R1、R2、R3和R4 (电路图中U1部分)的计算。
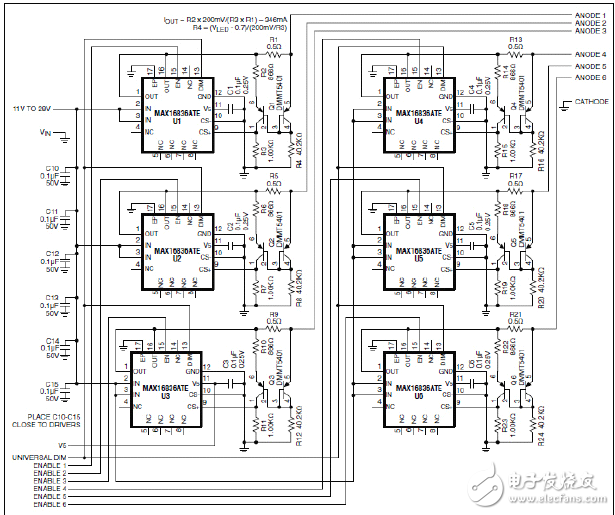
图1. 驱动器设计原理图
当LED 串的电压处于最小值(7.6V),而输入电压处于最大值(28V)时,LED 驱动电路功耗最大,大于7W。仅通过电路板散热很难耗散如此大的热量,所以,在高输入电压情况下,必须使用低占空比(低至25%)的调光信号驱动 UNIVERSAL DIM 输入,以降低驱动器的功耗。
解读NCV70522汽车自适应前照灯系统电路
由于机械结构的限制,自适应前照灯系统(AFS)应用中,步进电机有时可能会堵转。一旦电机堵转,电子控制单元(ECU)将失去前照灯位置的跟踪信息并作出不恰当的反应,滋生极严重的安全问题,所以AFS 应用中堵转检测是必不可少的。通常可以通过电机的反电动势(BEMF)来判断电机堵转与否。BEMF 因电机速度、负载及供电电压的不同而变化。传统的步进电机驱动芯片无BEMF 输出,但包含内置堵转检测算法。客户仅可以在寄存器里设定固定的堵转认定临界值,这表示在真实道路条件下所有设定值都必须在工作之前"离线"预设,而不能适配真实工作条件。NCV70522微步步进电机驱动器透过SLA 引脚提供BEMF 输出,这表示它能实时进行停转检测计算,并根据不同条件来调节检测等级。
NCV70522是一款微步步进电机驱动器,用于双极型步进电机。这芯片通过I/O 引脚及SPI 接口连接至外部微控制器。NCV70522输出电流有多种选择。它根据"NXT"输入引脚上的脉冲信号以及方向寄存器[DIRCTRL]或"DIR"输入引脚的状态来转动下一个微步。这器件提供从满步到32微步的细分、由SPI 寄存器SM[2:0]来选择的7种步进模式。NCV70522包含SLA 的输出,可以用于堵转检测算法及根据电机的BEMF 来调节转矩和速度计算。典型应用电路图如图所示。
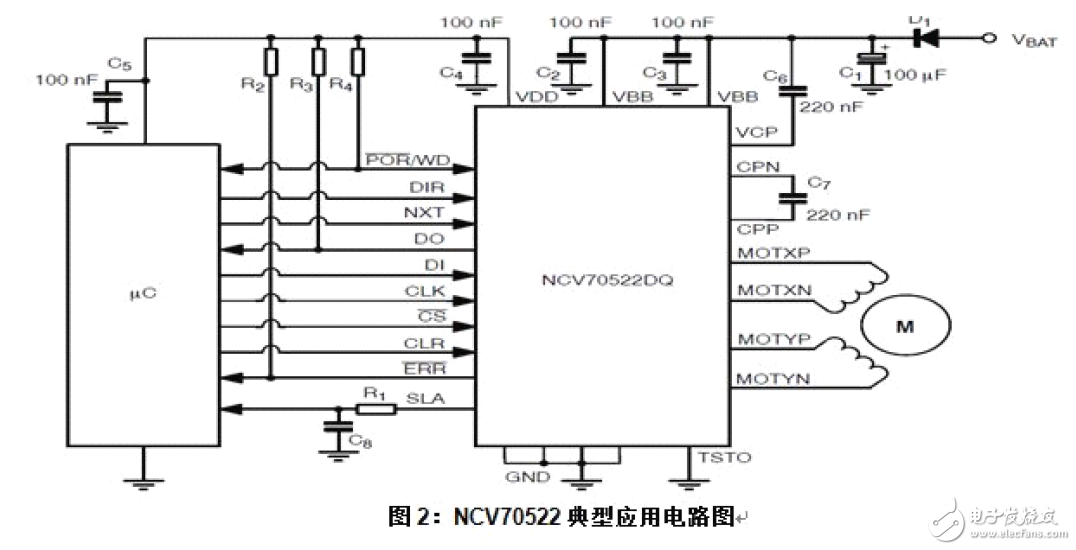
当系统上电时候,微控制器就会初始化,NCV70522复位。这些动作完成时,线圈电流及步进模式将被设定。然后电机驱动器将启用。NXT 脉冲将被发送实现转动电机。电机转速等于NXT 脉冲频率乘以步进细分模式的值。
------------------------------
机器视觉技术资料集锦——让机器视觉产品设计练就慧眼神通!

TOP2 解读两种机器视觉系统电路设计方案
机器人行走电路由驱动电路和直流电机的正反转电路两个单元构成。电路通过运用555构成的多谐振荡电路,同步计数器74LS196,七段译码器 74LS248,双JK触发器等基本单元电路,通过上述基本电路的级联组合,构成机器人行走电路。电路有效地实现机器人的行走与后退,通过调节阻值的大小而控制行走的时间,时间在数码显示管显示。利用三极管的导通和截止控制机器人的行走方向,从而满足设计电路的要求。
电路原理系统框图
方案一 电路图

555构成多谐振荡电路产生方波信号,74LS196构成十进制计数器,74LS248控制七段共阴极数码管显示电路显示,计数器计数满产生触发信号触发双JK触发器,双JK触发器在触发信号的作用下输出发生高低电平跳变,触发器发生信号驱动直流电机两端压差发生正负跳变,直流电机正反转,实现机器人的前进和后退。电路中各个开关控制电机的转动及转动方向和时间。
方案二 电路图
74LS123构成的定时器产生矩形波信号,用74HC161和与非门74HC03构成加十进制计数器,74LS248控制七段共阴极数码管显示电路显示,计数器计数满产生触发信号触发双JK触发器,双JK触发器在触发信号的作用下输出发生高低电平跳变,通过直流电机驱动电路改变电机两端电压方向,进而改变电机转向。电路中开关也可是电机制动,正反转。

机器人行走电路工作原理
555构成的多谐振荡电路产生方波信号接到74LS196时钟端触发74LS196加计数器计数,并通过74LS248驱动七段共阴极数码管显示计数。加计数器计数满十,通过74HC20与非门产生下降沿信号驱动双JK触发器使JK触发器构成的T‘触发器输出取非,从而驱
- 盘点:那些为健康而生的APP与智能硬件(11-24)
- 指尖的密码!手指静脉识别鼠标问世(02-02)
- WLAN射频优化的解决方案设计详解(03-03)
- 智能鞋垫:解决跑步者的膝伤问题(02-12)
- 混合动力汽车系统结构大盘点TOP3(03-14)
- 盘点STM32-NUCLEO开发与仿真平台(03-28)