基于激光传感器的无人驾驶汽车动态障碍物检测跟踪
主办的"中国智能车未来挑战赛",并取得了优异的成绩,见图12。

图12"智能先锋"号在2012年"中国智能车未来挑战赛"上成功检测到运动车辆并完成超车
6.2 结果
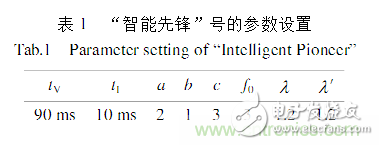
在实验和比赛中,"智能先锋"号的一些参数设置如表1所示。
"智能先锋"号用Velodyne和Ibeo对环境中的动静态障碍物进行检测,然后将检测到的结果表示在障碍物占用栅格地图上,如图13所示,黑色方框为根据本车行驶状态与环境信息自适应设定的聚类区域,进入到这个黑色方框内的动态障碍物都被成功检测到,并区别于其它的静态障碍物标示在栅格图上,这两个运动目标的检测结果和实际结果对比如表2所示。

图13 检测到动态障碍物并表示在栅格图上
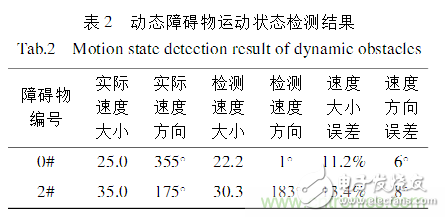
表2显示编号为0#的运动目标无论是速度大小
还是速度方向,其误差都小于编号为2#的运动目标,因为0#运动目标正好处于Ibeo的检测范围内,其运动状态信息是融合了Velodyne和Ibeo的数据,而2#的状态信息只来自Velodyne的数据处理结果。为了得到这两种结果准确率之间具体差异,对一辆基本保持速度大小为30km/h、航向为180?(正南方向)的车辆分别用这两种方式进行检测,并且在实验中,让"智能先锋"按照S形路线行驶,以测试无人驾驶汽车与目标障碍物运动方向在不同夹角下的检测稳定性,结果见图14和图15。
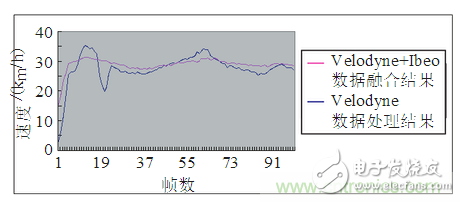
图14 两种检测方式得到的速度大小对比图
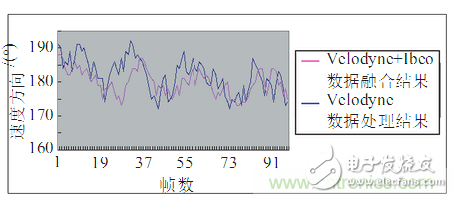
图15 两种检测方式得到的速度方向对比图
结果显示,采用融合Velodyne和Ibeo信息得到运动目标状态的方式相比于只用Velodyne处理结果的方式,检测结果的准确率和稳定性都得到了较大的提升.本方法对无人驾驶汽车前方关键区域采用前者方式进行动态障碍物检测,对其它区域采用后者方式进行检测,既合理地对传感器进行了配置,又保证了无人驾驶汽车行驶的安全性。
7 结论
本文提出的应用于无人驾驶汽车的动态障碍物检测及其表示方法,对传感器进行了合理配置,采用3维激光传感器Velodyne检测大范围环境中的动态障碍物信息,对于无人驾驶汽车前方关键区域,采用置信距离理论融合四线激光雷达Ibeo数据和Velodyne检测结果来提高检测准确率,并且根据障碍物的运动状态消除传感器数据处理延时所带来的障碍物位置误差,最终将动态障碍物和静态障碍物区别标示于障碍物占用栅格图上。大量的实验以及自主研发的无人驾驶汽车在"中国智能车未来挑战赛"中的优异表现证明了本方法的可靠性。但是由于传感器自身的局限性,在极其复杂的城市环境中,现有的检测准确率仍然难以满足要求,怎样对传感器进行更合理的配置以及提升检测算法的有效性来进一步提高动态障碍物检测准确率是下一步研究的重点。
- 汽车无人驾驶传感器平台大盘点(02-02)
- 自动驾驶距离我们还有多遥远?(02-16)
- 机器人时代:无人驾驶的野心(02-16)
- 多功能导盲车系统设计与实现(02-02)
- 智能汽车电子控制单元该如何简化(02-19)
- 汽车应用标准之争 凸显LIN竞争优势(02-24)