基于激光传感器的无人驾驶汽车动态障碍物检测跟踪
针对激光传感器在室外环境中检测动态障碍物所遇到的数据处理存在延时、检测结果准确率不高等问题,提出了一种基于3维激光传感器Velodyne和四线激光传感器Ibeo信息融合的动态障碍物检测及表示方法。该种方法应用在了自主研发的无人驾驶汽车平台上,大量的实验以及它们在"中国智能车未来挑战赛"中的优异表现证明该方法具备可靠性和准确性。
本方法通过分析处理Velodyne激光数据对无人驾驶汽车四周的动态障碍物进行检测跟踪,对于无人驾驶汽车前方准确性要求较高的扇形区域,采用置信距离理论融合Velodyne激光数据处理信息和Ibeo输出的运动状态信息,较大地提高了对障碍物运动状态的检测准确率,然后根据融合得到的结果对运动障碍物的位置进行延时修正,最终在障碍物占用栅格图上将动态障碍物所占据位置与静态障碍物所占据位置区别标示。本方法不仅可以在室外环境中准确地检测出障碍物运动信息,而且可以消除传感器数据处理延时所带来的动态障碍物位置偏差,更准确地将环境中的动静态障碍物信息用障碍物占用栅格图进行描述.该种方法应用在了自主研发的无人驾驶汽车平台上,大量的实验以及它们在"中国智能车未来挑战赛"中的优异表现证明该方法具备可靠性和准确性。
1 引言
无人驾驶汽车是人工智能的一个非常重要的验证平台,近些年成为国内外研究热点。无人驾驶汽车作为一种陆地轮式机器人,既与普通机器人有着很大的相似性,又存在着很大的不同。首先它作为汽车需保证乘员乘坐的舒适性和安全性,这就要求对其行驶方向和速度的控制更加严格;另外,它的体积较大,特别是在复杂拥挤的交通环境下,要想能够顺利行驶,对周围障碍物的动态信息获取就有着很高的要求。
国内外很多无人驾驶汽车研究团队都是通过分析激光传感器数据进行动态障碍物的检测。斯坦福大学的自主车"Junior"利用激光传感器对跟踪目标的运动几何特征建模,然后用贝叶斯滤波器分别更新每个目标的状态;卡耐基·梅隆大学的"BOSS"从激光传感器数据中提取障碍物特征,通过关联不同时刻的激光传感器数据对动态障碍物进行检测跟踪。
在实际应用中,3维激光传感器因为数据处理工作量较大,存在一个比较小的延时,这在一定程度上降低了无人驾驶汽车对动态障碍物的反应能力,特别是无人驾驶汽车前方区域的运动障碍物,对其安全行驶构成了很大的威胁;而普通的四线激光传感器虽然数据处理速度较快,但是探测范围较小,一般在100?~120?之间;另外,单个的传感器在室外复杂环境中也存在着检测准确率不高的现象。针对这些问题,本文提出一种利用多激光传感器进行动态障碍物检测的方法,采用3维激光传感器Velodyne对无人驾驶汽车周围的障碍物进行检测跟踪,利用卡尔曼滤波器对障碍物的运动状态进行跟踪与预测,对于无人驾驶汽车前方准确性要求较高的扇形区域,采用置信距离理论融合Velodyne和四线激光传感器Ibeo数据来确定障碍物的运动信息,提高了障碍物运动状态的检测准确率,最终在栅格图上不仅对无人驾驶汽车周围的动、静态障碍物进行区别标示,而且还根据融合结果对动态障碍物的位置进行了延时修正,消除了传感器处理数据延时所带来的位置偏差。这种方法应用在了自主研发的无人驾驶汽车上,在城市和乡村道路中进行了大量的实车实验,并在国家自然科学基金委举办的"中国智能车未来挑战赛"中取得了优异成绩。
2 系统结构
四线激光传感器Ibeo安装于无人驾驶汽车的正前方保险杠位置,3维激光传感器Velodyne安装于车顶上方,它们的具体安装位置如图1所示。
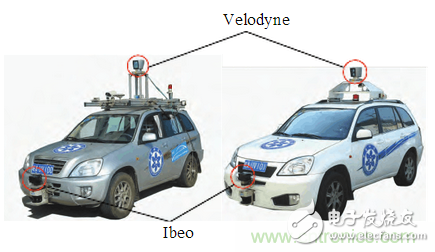
图1 传感器Velodyne和Ibeo安装位置
本文提出的无人驾驶汽车动态障碍物检测及其表示方法流程如图2所示。首先对Velodyne数据进行栅格化处理得到一张障碍物占用栅格图,对不同时刻的栅格图进行聚类跟踪可以获取障碍物的动态信息,将动态的障碍物从栅格图中删除并存储在动态障碍物列表中,这个删除了动态障碍物占用信息的栅格图也就是一张静态障碍物栅格图,然后将动态障碍物列表中的动态障碍物信息和Ibeo获取的无人驾驶汽车前方区域内的动态障碍物信息进行同步融合得到一个新的动态障碍物列表,最后将这个新的列表中的动态障碍物合并到静态障碍物栅格图中得到一张动静态障碍物区别标示的栅格图。
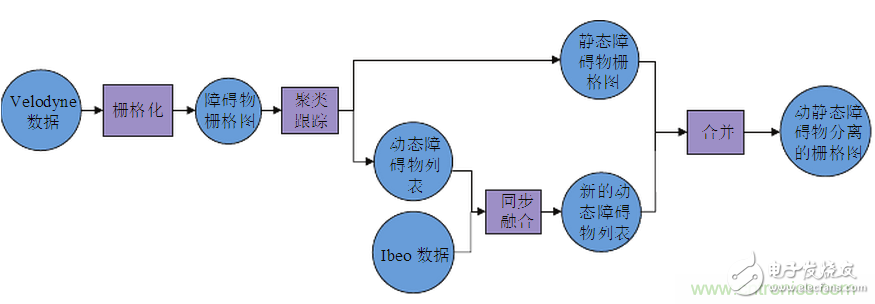
图2 无人驾驶汽车动态障碍物检测及其表示方法流程图
本文创建的障碍物占用栅格图大小为512&TImes;512,每个栅格的大小为20cm&TImes;20cm,无人驾驶汽车车头朝向与y轴正方向同向且位于这个栅格地图中的(256,100)位置。栅
- 汽车无人驾驶传感器平台大盘点(02-02)
- 自动驾驶距离我们还有多遥远?(02-16)
- 机器人时代:无人驾驶的野心(02-16)
- 多功能导盲车系统设计与实现(02-02)
- 智能汽车电子控制单元该如何简化(02-19)
- 汽车应用标准之争 凸显LIN竞争优势(02-24)