基于激光传感器的无人驾驶汽车动态障碍物检测跟踪
物块与之匹配的障碍物块,将其存在置信度加1,更新其所在位置,并根据经典卡尔曼滤波算法更新得到其速度、加速度以及速度协方差和加速度协方差.考虑到传感器误差,本文认为速度值小于一个较小值(比如0.5m/s)的障碍物块是静止或者接近于静止的,所以如果更新得到的速度大于这个较小值,将其运动置信度加1,反之减1。
当然在实际操作中,动态障碍物列表中的障碍物块运动置信度和存在置信度都设置了上下限值。最后将动态障碍物列表中那些存在置信度小于一个设定值的障碍物块从列表中删除,因为本文认为这些障碍物块已经从无人驾驶汽车周围环境中消失,这样还能保证动态障碍物列表中的障碍物块数目不会随着时间累积而无限增大。
3.4 静态障碍物栅格图生成
更新完动态障碍物列表后,按照如下的Func-tion2对前面栅格化后得到的栅格图进行处理,可以生成一张静态障碍物栅格图。

4 传感器数据融合
4.1 传感器数据同步匹配
因为四线激光传感器Ibeo能直接输出环境中的动态障碍物信息,而Velodyne数据经过上文中的一系列处理才能得到环境中动态障碍物信息,两者的数据采集和处理耗时不同,所以首先需要同步匹配两者的障碍物信息。
Ibeo输出的动态障碍物信息是用一个个box的格式进行表示的,每个box的参数包括边长a、b,中心位置和速度v的大小方向,如图7所示。
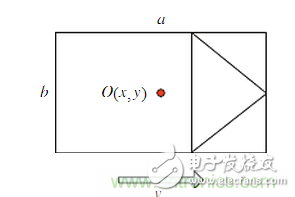
图7 Ibeo输出动态障碍物信息示意图

图8Velodyne数据和Ibeo数据同步示意图
本文将box的中心位置朝其速度方向的反方向平移距离S,如图8所示,S的大小满足式(4):
其中和分别是采集处理Velodyne数据和Ibeo数据的耗时,λ是参数。
同步完成后,就可以匹配两个传感器的障碍物块信息,本文认定,与某个box有区域重叠的障碍物块,即和该box成功匹配,这样匹配的结果也有以下3种:
①没有Velodyne检测到的障碍物块与之成功匹配的box,不作任何处理。
②没有box与之成功匹配的Velodyne检测到的障碍物块,如图9中的,也不作任何处理,仍然采用Velodyne的检测结果作为最终结果。
③有box与之成功匹配的Velodyne检测到的障碍物块,如图9中的和,它们都需要融合Velodyne和Ibeo数据得到最终运动状态,具体的融合方法见下节。
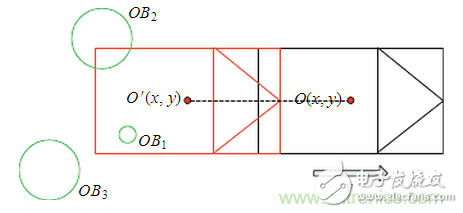
图9 Velodyne数据和Ibeo数据匹配示意图
4.2 传感器数据融合
同步匹配完成后,采用置信距离理论对匹配成功的两个传感器数据进行融合,假设和分别是Velodyne数据计算得到的运动状态和Ibeo输出的运动状态,它们都服从高斯分布,某次测量它们得到的数据分别是和,则它们的概率密度函数见式(5)、(6):


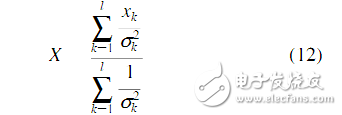
最后对满足输出支持传感器个数为2的传感器数据按照式(12)进行融合,最终得到障碍物块的运动状态X,其中l是满足输出支持传感器个数为2的传感器个数。
融合完成后,考虑到Velodyne数据采集处理耗时,动态障碍物的占据位置在这段时间内实际发生了变化,需要对这些占据位置进行修正。修正方式为,将动态障碍物列表中那些运动置信度大于上面设定值的障碍物块的所有占据位置朝其速度方向平移距离S′,如图10所示,S′的大小满足式(13),其中v′是经过融合后的障碍物块运动速度.这些经过融合、修正后的障碍物块信息都更新存储在动态障碍物列表中。

图10 动态障碍物位置修正示意图
5 合并动静态障碍物占用栅格图
经过上面的步骤,得到了一个融合了Velodyne数据计算结果和Ibeo输出结果的动态障碍物列表以及一张静态障碍物占用栅格图。在本文中,障碍物占用栅格图作为无人驾驶汽车描述周围环境的唯一方式,最后还要将动态障碍物的占用信息添加进来,参见Function3对静态障碍物占用栅格图进行处理即可得到最终的障碍物占用栅格图。最终得到的这张障碍物占用栅格图中不仅将动静态障碍物进行了区别标示(静态障碍物占用栅格标示为T=1,动态障碍物占用栅格标示为T=2),实现了动静态障碍物的分割,而且消除了传感器处理数据延时所带来的动态障碍物位置偏差,更准确地对环境信息进行了描述。

6 实验结果
6.1 实验平台及场景
本方法被应用到自主研发的无人驾驶汽车"智能先锋"号上,在一个开放的城区环境中进行了大量的实车测试,如图11所示。这个开放的城区环境南北长6800m,东西长2600m,其中存在着大量的机动车、非机动车以及行人,在这个真实驾驶环境的区域内测试了无人车对各种类型的动态障碍物的检测性能。

图11 无人驾驶汽车实车测试区域
另外,应用该方法的无人驾驶汽车参加了由国家自然科学基金委
- 汽车无人驾驶传感器平台大盘点(02-02)
- 自动驾驶距离我们还有多遥远?(02-16)
- 机器人时代:无人驾驶的野心(02-16)
- 多功能导盲车系统设计与实现(02-02)
- 智能汽车电子控制单元该如何简化(02-19)
- 汽车应用标准之争 凸显LIN竞争优势(02-24)