一文教你看懂无人驾驶的关键激光雷达
自从2012年谷歌无人驾驶汽车刷屏以来,顶在车顶的"全家桶"总是这么引人瞩目。而这"全家桶"就是传说中的激光雷达。
这款激光雷达的供应商是来自美国Velodyne,当时这个"全家桶"造价高达7万美刀,比车还贵!准确来说,应该可以买5辆比亚迪…
OK,说到这里,大家肯定要问了,激光雷达最近好像听到频率很高啊?
没错,说到激光雷达就不得不提最近风头正劲的ADAS。现阶段的ADAS,激光雷达、毫米波雷达、视觉传感器是用于周围环境感测的主流手段,是实现ADAS的必备。
而所谓激光雷达,就是利用激光束探测目标,获得数据并生成精确的数字高程模型。它的工作原理也不难理解,就是发射和接收激光束。在激光雷达的内部,每一组组件都包含一个发射单元与接收单元。我们拿激光雷达领域最有名的公司Velodyne的旋转镜面设计图来说明。
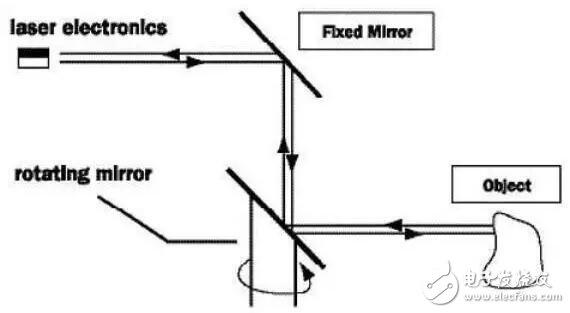
激光雷达工作原理(图片来自Velodyne)
这套发射/接收组件和旋转镜面结合在一起,能扫描至少一个平面。镜面不只反射二极管发出去的光,而且也能把反射回来的光再反射给接收器。通过旋转镜面,能够实现 90到180度的视角,并且大大降低系统设计和制造的复杂度,因为镜面是这里面唯一的运动机构。
探测距离的原理是基于光返回的时间,激光二极管发出脉冲光,脉冲光照射到目标物后反射一部分光回来,在二极管附近安装一个光子探测器,它可以探测出返回来的信号,通过计算发射和探测的时间差就可以计算出目标物的距离。脉冲距离测量系统一旦被激活就能收集到大量的点云。
如果点云中有目标物,目标物就会在点云中呈现出一个阴影。通过这个阴影可以测量出目标物的距离和大小。通过点云可以生成周围环境的3D图像。点云密度越高,图像越清晰。
讲完激光雷达的原理,同志们可能又有疑问了,为什么ADAS里要装两种雷达,激光雷达和毫米波雷达的区别又是什么呢?
小编特意给大家理了张图,对比激光雷达和毫米波雷达的各方面能力,大家一看便知:

总体而言,激光雷达的精度更高,但是价格昂贵。
激光雷达的优势非常明显,其探测的范围更广,且精度更高。但是在极端天气或者烟雾环境下性能大大降低,而且由于其数据采集量大,价格也非常贵。目前安装在百度和谷歌无人驾驶汽车上的64线激光雷达(线数越多,性能越好,造价越贵),售价就高达70万人民币。
毫米波雷达受制于波长,但是价格较低。
毫米波雷达的技术相对成熟,其波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点,且其引导头具有体积小、质量轻和空间分辨率高。此外,毫米波导引头穿透雾、烟、灰尘的能力强,相比于激光雷达是一大优势。但是,由于其收到频段损耗的直接制约,导致其对周边所有障碍物无法进行精准的建模。不过受益于技术成熟,其单价也更低,只有100美元左右,而且市场需求相较激光雷达更多。
所以为了互补,大多数ADAS上都会装上两款雷达。不过,要推广ADAS,实现无人驾驶的远大理想,激光雷达的成本问题便成了关键。试想一下,一个激光雷达卖的比车还贵,会有用户买单吗?
所以,大家都在找把激光雷达成本降低的方法,然后!固态激光雷达就诞生了!
固态激光雷达第一次出现在大众视野中应该是在今年1月的美国CES上,激光雷达初创公司 Quanergy Systems 发布了号称是全球第一款固态激光雷达传感器,并称如果订货量在一万台,每台激光雷达的成本有望控制在 100 美元以下。(这家公司我们下文会做详细介绍,大家不用着急百度)
100美元啊,什么概念啊…原来几十万的东西,现在就买几百块啊!到底是干了什么才能让成本下降这么多呢?
我们又要回到原理上来,传统的激光雷达是靠360度机械旋转来运作的,而固态激光雷达则采用了基于电子部件进行数据读写的方案,去除了机械旋转部件,采用集成电路上的感应晶片扫描各个方向,然后输出车辆周围的 3D 图像。另外,Quanergy还将其线数还降低到了8线,这样不仅大大降低了成本,而且还缩小了体积。
用一张比较通俗易懂的图解释应该就是这个了:
不过"固态"就意味着激光雷达不能进行 360 度旋转,只能探测前方。但是,只要在车辆上多装几个就可以解决探测范围的不足了。
除了固态激光雷达,目前还有一种混合固态雷达,也是另外一种过渡性的产品。混合固态雷达虽然从外观上看不到传统激光雷达的旋转机制,但是为了360全视角,其内部实际上仍然存在一些机械旋转部件。只是这套机械旋转部件做的非常小巧并且藏在机身内部而已。
不过,虽然以上两种方案是把
- 汽车无人驾驶传感器平台大盘点(02-02)
- 自动驾驶距离我们还有多遥远?(02-16)
- 机器人时代:无人驾驶的野心(02-16)
- 多功能导盲车系统设计与实现(02-02)
- 智能汽车电子控制单元该如何简化(02-19)
- 汽车应用标准之争 凸显LIN竞争优势(02-24)