基于图像采集的汽车车牌定位识别,软硬件协同
fer做以上运算,Line buffer的结构如下。
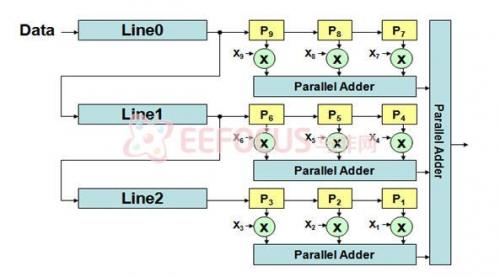
图6 line buffer结构
如上图所示的电路,Data是图像数据,从第一行开始,依次传输给Line0的输入端。Line0、Line1、Line2为移位寄存器,每个移位寄存器的深度为图像的行宽。由于图像中相邻两行中上下相邻的数据从一维的角度来看恰好是一个行宽,因此可以发现每次Line0、Line1、Line2所输出的数据均是相邻三行中同一位置的数据,同时,相邻时刻同一移位寄存器输出的数据在当前行上是相邻的,于是可以发现,每一时刻P1~P9共9个数据就是进行边缘检测所需要的矩阵,获得数据矩阵后利用乘法器将每个数据与边缘检测模板对应位置上的数据相乘,然后通过并行加法器将其相乘即可获得边缘检测后图像上每个点的值。
● 形态学处理
数学形态学是由一组形态学的代数运算子组成的,它的基本运算有4个: 膨胀(或扩张)、腐蚀(或侵蚀)、开启和闭合, 它们在二值图像和灰度图像中各有特点。数学形态学方法利用一个称作结构元素的"探针"收集图像的信息,当探针在图像中不断移动时, 便可考察图像各个部分之间的相互关系,从而了解图像的结构特征。数学形态学基于探测的思想,与人的FOA(Focus Of Attention)的视觉特点有类似之处。作为探针的结构元素,可直接携带知识(形态、大小、甚至加入灰度和色度信息)来探测、研究图像的结构特点。在车牌识别中引进形态学算法可以简化FPGA中实现方法的复杂度,充分利用FPGA擅长简单、数据量大的算法的特点,使算法的准确度与速度都有了很大的提升。
在本项目中,可先采用结构元素对二值汽车图像作腐蚀运算以去除一些噪声,在去噪基础上,使用结构元素作闭运算,使车牌区域形成连通的区域。经过形态学运算,车牌区域已形成闭合的连通区域,然后对连通区域作标记。
FPGA实现:结构元素可以用parameter直接定义,难点依然在于图像像素的获取。这里同样可以采取边缘检测中提到的line buffer,只是所做的运算不同。
● 精确定位
形态学处理后的图像可能包含干扰区域,因此,在连通区域标记的基础上,计算出每个连通区域的外接矩形框,并利用车牌的先验知识确定车牌区域的位置。该方法可以较好地确定图像中车牌区域的位置,且算法简单、实时性较强。
在以上各步骤中,灰度化、去噪、二值化、边缘提取形态学处理等算法可用Verilog HDL实现,精确定位算法涉及到连通区域分析,相对复杂,可考虑利用Microblaze实现。
- 一种边缘检测与扫描线相结合的车牌定位算法(06-14)
- 车牌定位在电子警察中的工程应用(06-15)
- 一种利用Hough变换和先验知识的车牌识别新方法(06-13)
- 基于支持向量机的车牌定位方法(08-26)
- 智能交通系统之车牌定位及GPS定位经典案例汇总(11-15)
- Turn Key解决方案:汽车车牌定位识别系统的设计实现(09-02)