安森美半导体用于汽车自适应前大灯系统的电机控制方案
车灯,好比汽车的眼睛,是保证汽车安全行驶的重要组成部分。而传统的汽车照明系统已无法满足人们日益提高的安全行车的需求,特别是在夜间行驶时普遍存在着两大显著的缺点:一是驾驶员容易受迎面而来的车辆的眩光影响而分散注意力,增加了事故隐患;二是在弯道或十字路口能见度低,且存在照明盲区。据美国国家高速公路交通安全管理局公布的数字,汽车约有25%的时间在夜间行驶,但超过40%的重大事故发生在这个时间段。为减少眩光,欧洲各国当局要求为汽车配备自动前大灯调平系统。自适应前大灯系统(AFS)是应此要求而开发,可自动适应不同行驶环境和条件照亮前方,进一步提升行车安全性。
自适应前大灯系统(AFS)的优势
(一) 自动调平以减少眩光
当汽车匀速行驶在平坦的路面时,前大灯光束是平行于路面而照向前方的,但在其它情况下(通过减速带时、紧急制动、加速行驶或加油时等等)可能会倾斜,而自动调平系统使汽车前大灯光束能保持与路面平行,并有助于在上坡路或下坡路时防止大灯照向太远。该功能通过负载轴传感器信号调平前大灯,可适应不同负载和不同坡度情况。
自调平系统中的调平传感器向电子控制单元(ECU)发送关于汽车倾斜的信息,而调平控制单元利用刹车或油门踏板的应用提示、速率变化、悬挂行程和压力等线索智能地滤除传感器数据,同时计算倾斜度,然后前大灯据此信息向上或向下移动以便驾驶员在不平坦的地形或刹车时纠正车距的变化,或在检测到迎面而来的汽车时自动将大灯远光调为近光以防止眩光影响。如图一的上中下三图,分别展示了汽车在正常水平条件下、向后倾斜和向前倾斜的照明效果。
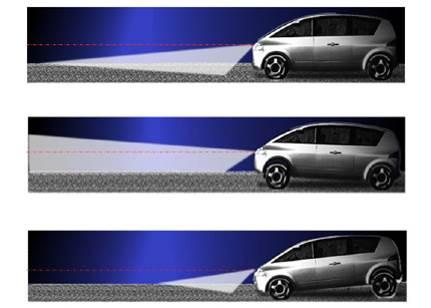
图一 AFS自动调平的3种照明效果
(二) 自动旋转点亮传统前照灯的照明盲区
传统前照灯在弯道处存在照明盲区,因为其光束方向始终与车身一致,驾驶员无法看清弯道内侧的路况;而配备AFS的汽车能根据转弯角度和车轮速度的实时传感器数据旋转前大灯到所需的方向,点亮弯道内侧,提高了驾驶员和其它汽车驾驶员及行人的安全(图二)。
各种研究表明,当汽车行驶到转弯处,AFS的自动旋转功能使驾驶员凝视点的光照增加了3倍,拐角额外的光照增加了58%,帮助驾驶员识别到障碍物。

图二 配备AFS前后的照明效果比较
AFS的工作原理
控制前大灯的运行是根据汽车四周各种传感器的输入如转弯位置、速度、车距等来进行的,驱动器IC负责将输出转换为需要的PWM波形以驱动步进电机到所需的位置。这就要求电机驱动器不仅快速准确,而且可靠和容错。步进电机能以适当的响应时间和高精度实现平稳和渐进的运行,而且其成本低、强固,为给定尺寸提供高转矩,无需反馈信号就能正确定位,适用于AFS应用。
步进电机驱动器在自适应前大灯系统中发挥关键作用。如图三所示,在左右前大灯里各有两个步进电机:一个在垂直面控制调节大灯高度,一个在水平面控制调节光束的旋转。与前大灯的调平系统和各调平传感器的通信经由汽车数据网络系统传输。控制器局域网络(CAN)总线用于收集和分发传感器数据,局域互联网络(LIN)总线用于控制前大灯。
前大灯控制器基于悬挂传感器数据、横摆角速度、车体转向角度和车速采用合适的光束角度,并向最终控制的前大灯发送高调平调节命令。然后一对步进电机专用标准产品(ASSP)将来自前大灯控制的高调平调节命令转换为必要的电机定位信号,以调平或旋转前大灯光束。
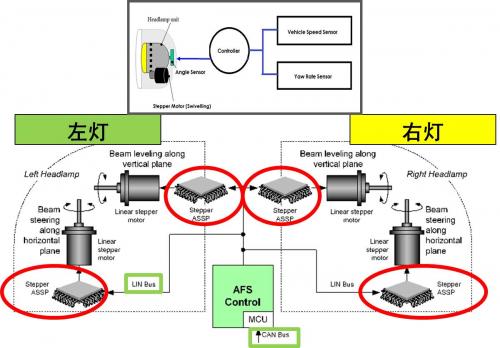
图三 AFS的工作原理
安森美半导体应用于AFS的主要电机控制方案
安森美半导体提供多种方案用于AFS,主要产品如低功耗高速CAN收发器NCV7340和独立式低功耗混合信号LIN收发器NCV7321、微步进电机驱动器NCV70514、NCV70627和NCV70522。
NCV70514和NCV70522是双H桥两相微步进电机驱动器,二者都是通过I/O引脚和SPI接口与外微控制器连接,根据步进输入引脚(NXT)上的时钟信号和电机运转方向(DIR)启动下一微步。关键特性包括:提供从整步到32微步的7种模式选择、完全集成电流感测器、PWM电流控制自动调速等。
NCV70514在检测到发生堵转时的电气故障、欠压或不断升高的结温时会发出故障信号。它采用专有的PWM算法提供可靠的电流控制。
NCV70522包含速度和负载角(SLA)输出,支持创建堵转检测算法和控制环路,以根据电机的反电动势(BEMF)调节转矩和速度,集成5 V稳压器,并集成复位功能和看门狗功能以及热警告和热关断等。
NCV70627是带位置控制器和控制/诊断接口的单芯片微步进电机驱动器,通过LIN远程连接至主机,是专用的机电一体化方案,通过总线接收定位指令,然后驱动电机线圈到所需的位置,可配置用于不同
- 安森美半导体针对汽车应用的高能效解决方案(11-08)
- 安森美半导体汽车技术及车身和动力系统解决方案(11-20)
- 安森美半导体先进汽车照明解决方案点亮汽车内外(03-11)
- 安森美半导体高效节能汽车电子方案配合发展趋势(08-03)
- 汽车启动/停止系统电源方案(11-17)
- 省毫瓦以增里程;提升汽车CAN总线能效以增强燃油经济性(01-24)