基于CDMA/CAN的车辆故障远程监控系统
1 引言
在美国制造和销售的所有的小汽车和轻型卡车从1996年1月1号起都必须装备有车载 自动诊断系统(OBD-II)。然而OBD-II主要用于排放系统的诊断,车辆的其他各个子系统能被OBD-II诊断的比较少。虽然这些诊断码对诊断部分 故障是很有用的,但是这些信息还不足以有效的区分特定的故障部位。通过接入OBD-II接口的扫描工具能获得故障码,但是各个生产厂商提供的手持式扫描工 具与OBD-II通信的标准并不统一,欧洲和大部分亚洲国家使用ISO9141标准与OBD-II通信,而通用汽车的小汽车和轻型卡车则使用sae j1850 vpwm标准,福特公司采用sae j1850pwm标准。
这样就导致传统的汽车故障诊断有如下缺点:在不同汽车制造商之 间诊断技术没有形成标准,无疑这会导致车辆的诊断成本大幅增加;故障诊断需要驾驶车辆到特定的修理地点,这导致驾驶者的不方便,也不可能经常的进行定期的 诊断和维护;一次全面地诊断需要特定的设备和熟练的技术员,这会使诊断的成本很高;故障码提供的信息通常是不足够精确来指出故障的来源;随着汽车电子控制 系统变得越来越复杂,诊断各部分的故障也越来越困难。
汽车上各种电子控制单元的数目不断增加,连接导线显著增加,因而提高控制单元间通 讯可靠性和降低导线成本已成为迫切需要解决的问题。为此以研发和生产汽车电子产品著称的德国Bosch公司开发了CAN总线协议,并使其成为国际标准 (ISO11898)。CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块编码,采用这种方法可使网络内节点个数在理论上不受限 制,还可使不同的节点同时收到相同的数据。
随着远程通讯、总线技术、基于模型的诊断、电子和嵌入式技术的进步,车辆的故障诊断和监控技术得到很大发展,使得能够在车辆行驶的过程中实现远程诊断和监控。这些技术的具备和车主们越来越大的兴趣使得汽车界也投入了越来越多的精力来实现远程诊断和监控。
2 系统结构设计
2.1 系统原理
车辆的远程故障诊断是一个多学科的复杂系统,包含车载故障诊断单元,远程车辆信息技术服务中心和无线通讯网络系统。近来出现了许多相关的专利和文章。
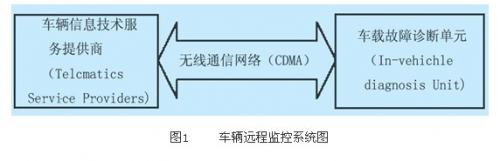
图1是车辆的远程故障诊断系统的工作原理图,车载故障诊断单元和服务中心通过无线通讯来实现远程诊断:远程服务中心通过无线网络获得车载故障诊断单元发 送的状态信息,然后通过分析车辆的运行参数和故障码,远程信息技术服务中心通知车主故障的严重程度,并提供必要的支持服务,并安排必要的保养或者建议修理 来解决出现的故障。
2.2 功能设计
(1) 车辆能智能化的向远程服务中心提供故障码,关键传感器的值和其他相关运行参数,并具备获取下载或者系统软件升级的能力。
(2) 车辆和远程服务中心均具备适当人机接口的先进实时诊断和监控模块。
(3) 车辆的远程故障诊断服务中心具有权威的专家负责复杂的诊断和监控并与驾驶者交流。
(4) 保证远程故障诊断服务中心和相应车辆的数据通讯以及与驾驶者通话的无线网络。
从系统原理图(图1)分析可以得出:被诊断的车辆通过无线网络与车辆信息技术服务中心(telematics service providers,tsp)保持通信。车辆信息技术服务中心不但可以像传统ISP一样提供Internet服务,还可以提供安全,GPS,客户关系管理 等服务。而且,车辆信息技术服务中心还能够提供专业的故障诊断专家来为车主提供诊断服务。诊断专家通过从车载电子系统传来的故障码实时分析车辆的故障程 度。车主也可以通过移动电脑无线上网或者移动电话通过wap来浏览车辆信息技术服务中心提供的更加具体的故障码说明,以及其他导航服务。同时我们的车辆信 息技术服务中心还要掌握有以下资源,如车辆制造商数据中心,道路拯救车辆以及车辆修理,保养店面等。
3 软件设计
该系统的软件设计主要分为两部分:位于车辆信息技术服务中心的专家系统设计和位于车辆的车载故障诊断单元设计。
3.1 专家系统设计
这部分是位于车辆信息技术服务中心的应用程序,除了普通的web服务,GPS服务,跟踪服务等以外,最主要的是能提供故障的专家诊断。这部分功能由专家系统辅助以现场专家来完成。通过专家系统来尽可能快地给车主反馈故障诊断的信息,并提出解决的专家建议。
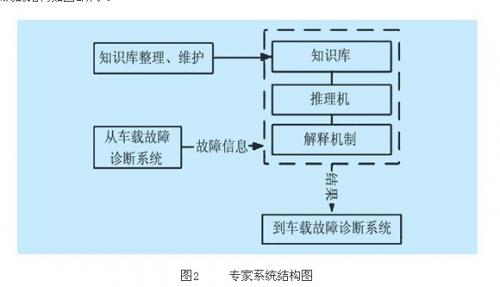
开发专家系统,首先需要将汽车维修领域专家的大量实际维修经验进行汇总和提炼,编成知识库,构成专家系统的核心部分;然后建立推理机,推理机可根据车载 故障诊断单元发送过来的数据,利用知识库中的知识,按一定策略进行推理,从而得出诊断结果。专家系统的结构如图2所示:
知
OBD-II CDMA 车辆故障远程监控系统 CAN 相关文章:
- 如何通过CDMA模块实现车载终端数据通信(01-05)
- 高速列车互联网络无线传输DS-CDMA系统设计(02-24)
- 另类传感器观念:汽车传感器(3)(11-30)
- 如何解决汽车车身控制设计的三大挑战 (09-29)
- 基于LIN总线的车灯控制系统(07-10)
- 一种汽车电动式转向器的电控系统设计(02-21)