新型电动汽车锂电池管理系统的研究与实现 — CAN 总线设计
5.1 CAN总线简介
控制器局部网(Control Area Network,CAN)是德国Bosch公司为现代汽车应用开发的一种多主机局部网络,CAN总线最初为解决汽车中众多的控制与测试仪器之间的数据交换而开发的。CAN卓越的特性、极高的可靠性和独特的设计,特别适合工业过程监控设备的互连,因此,越来越受到工业界的重视,并已在工业上得到广泛的应用,被公认为最有前途的现场总线之一。
CAN总线是一种串行数据通信协议,通信介质可以是双绞线、同轴电缆或光导纤维,通信速率可达1Mbps.CAN总线通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。采用这种方法的优点可使网络内的节点个数在理论上不受限制,数据块的标识码可由11位或29位二进制数组成,因此可以定义211或229个不同的数据块,这种按数据块编码的方式,可以非常灵活地控制节点的通信对象和通信来源,比如使不同的节点同时接受到相同的数据,这一点在分布式控制系统中非常有用。数据段长度最多为8个字节,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求。同时,8个字节不会占用总线时间过长,从而保证了通信的实时性。CAN协议采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性。CAN具有下列主要特性:
正因为CAN总线有着如此卓越的特性,它现已成为汽车车体通信的标准。
5.2 CAN总线通信的基本原理
5.2.1 CAN总线的位数值表示
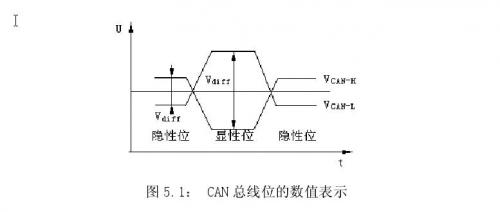
CAN总线用"显性"(Dominant)和"隐性"(Recessive)两个互补的逻辑值表示"0"和"1"。当在总线上出现同时发送显性和隐性位时,其结果是总线数值为显性(即"0"和"1"的结果为"0")。如图5.1所示,VCAN-H和VCAN-L为CAN总线收发器与总线之间的两接口引脚,信号是以两线之间的"差分"电压形式出现。
隐性:VCAN_H和VCAN_L均被固定为平均电压电平2.5V,VDIFF近似为0.在总线空闲或"隐性"位期间,发送"隐性"状态。
显性:VCAN_H和VCAN_L为大于阈值的差分电压。VCAN_H大约为3.5V,而VCAN_L大约为2.5V.在报文冲突的时候,显性位的优先级高于隐性位,也就是逻辑"0"优先于逻辑"1",这是CAN总线冲突处理机制的基础。
5.2.2 CAN的分层结构
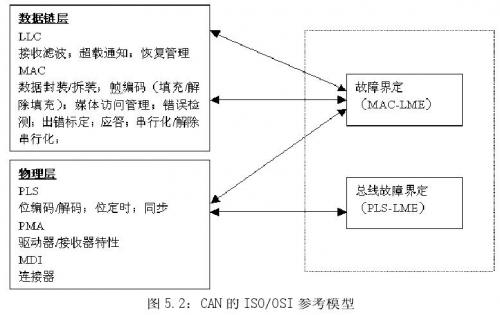
根据ISO/OSI参考模型,CAN被分为以下不同层次:
(1)物理层(Physical Layer)物理层是将ECU连接至总线的电路实现,它由三部分组成:
物理信令(PLS)实现与位表示、定时和同步相关的功能; 物理媒体附属装置(PMA)实现总线发送/接受的功能电路并提供总线故障检测方法。 媒体相关接口(MDI)实现物理媒体和MAU之间的机械和电气接口。(2)数据链路层(Data Link Layer)包含以下两个子层:
介质访问控制子层MAC(Medium Access Control)是CAN协议的核心。它把接收到的报文提供给LLC子层,并接收来自LLC子层的报文。MAC子层负责报文分帧、仲裁、应答、错误检测和标定。MAC子层也受一个名为"故障界定"(Fault Confinement)的管理实体监管。此故障界定为自检机制,以便把永久故障和短时扰动区别开来。 逻辑链路控制子层LLC(Logic Link Control)涉及报文滤波、过载通知、以及恢复管理。CAN的ISO/OSI参考模型的层结构如图5.2所示。
5.3 CAN系统的硬件结构
CAN系统结构如图5.3:
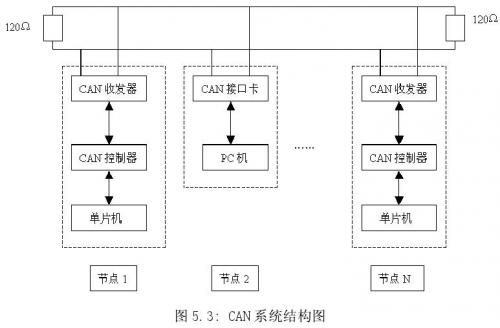
CAN系统中有两类节点:一类由CAN接口卡和PC机组成,CAN接口卡可以是PCI卡、ISA卡,也可接在PC机的并行口上;另一类由单片机、CAN控制器、CAN收发器组成。这里主要介绍单片机节点,在每个节点上,单片机主要用于系统的计算及信息处理功能;CAN控制器主要用于系统的通信;CAN收发器主要用于增强系统的驱动能力。系统的发送过程是:单片机将外围设备或其它节点传送过来的信息处
- 电动汽车:颠覆性的快速充电与非接触充电技术(09-20)
- 电动汽车的基本概述及重要组成(10-28)
- 矢量控制变频器在混合动力电动汽车中的应用(01-27)
- 基于CAN总线的电动汽车控制系统设计(05-25)
- 电动汽车驱动系统中的超级电容原理(05-21)
- 动力电池管理系统硬件设计技术(05-30)