基于图像采集的汽车车牌定位识别,软硬件协同
法的一个共同出发点是通过牌照区域的特征来判断牌照。可利用的车牌特征可以概括如下:
(1)车牌区域内的边缘灰度直方图统计特征:有两个明显且分离的分布中心。
(2)车牌的几何特征:车牌的宽、高比例在一定范围内。
(3)车牌区域的灰度分布特征:穿过车牌的水平直线其灰度呈现连续的峰、谷、峰的分布。
(4)车牌区域水平或垂直投影特征:车牌区域水平或垂直投影呈现连续的峰、谷、峰的分布。
(5)车牌形状特征和字符捧列格式特征:车牌有矩形边框,字符位于矩形框中且有间隔。
(6)频谱特征:对图形作行或列的DFT变换,其频谱图中包含车牌位置信息。除此之外,车牌字符的纹理特征、字符与背景之间的灰度特征、车牌的字符颜色与底色的固定搭配、车牌的结构特征等越来越多地的车牌特征也正被发掘出来作为车牌定位算法的依据。
根据车牌的不同特征,可以采用不同的定位方法。目前车牌定位的方法很多,最常见的定位技术主要有基于边缘检测的方法、基于彩色分割的方法、基于小波变换的方法、基于遗传算法的方法、基于数学形态学的车牌定位和基于灰度图像纹理特征分析的方法等, 车牌定位算法在车牌识别技术中占有很重要地位,一个车牌识别系统的识别率往往取决于车牌定位的成功率及准确度,考虑到FPGA适合做数据量大且运算简单重复的特点,我们将采用基于数学形态学的方法来进行定位。
对采集存储在Cellular RAM中的图像进行处理的过程分为两大步:预处理和车牌定位。其具体流程如下:
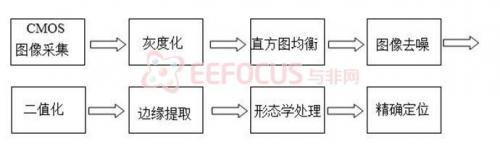
图4 图像处理流程
● 灰度化
通过CMOS摄像机或数码相机等设备拍摄的汽车图像以二进制格式存放在FPGA中,在预处理前的图像都是彩色图像。彩色图像又称RGB图像,它是利用R、G、B 3个分量表示一个像素的颜色,R、G、B分别代表红、绿、蓝3种不同的颜色。通过三基色可以合成出任一颜色。所以对于一个尺寸为m×n的彩色图像来说,存储为一个m×n×3的多维数组 由于彩色图像中所含的信息比较分散,而且数据处理量很大,因此我们需要首先对车流彩色图像进行预处理,本项目的算法是基于灰度图像,因此首先将RGB图像转化为灰度图。
FPGA实现:直接提取G通道的数据即可。
● 直方图均衡
直方图均衡化是一种图像对比度增强的方法,它的实质是通过减少图像的灰度级以换取对比度的增大。
● 图像去噪
采集的图像由于各种原因难免会引入噪声,因此有必要对噪声进行消除或减小,以便于后续处理。本项目初步选择中值滤波来减小噪声,中值滤波是一种非线性的图像平滑法,它对脉冲干扰级椒盐噪声的抑制效果好,在抑制随机噪声的同时能有效保护边缘少受模糊。
● 二值化
为了更好的利用车牌的某些特征将车牌从图像中突显出来,为车牌定位打好基础,再将预处理的图像转换为二值图像。二值化算法又称为阈值算法,常见的二值化方法有动态阈值法、局部阈值法及全局阈值法,典型的全局阈值法有Otsu、迭代法等,其目的就是要找出一个合适的阈值,将待处理的区域划分为前景和背景两个部分。我们认为车牌区域是车流图像的前景区,其他的部分都看成是背景区.因此简单来说,对于梯度图像的二值化实际上就是确定一个最佳的分割阙值,可根据具体的实验结果选取合适的方法。
● 边缘提取
边缘是图像最基本的特征之一,是图像分割、纹理分析及图像识别所依赖的重要依据。在汽车图像中,牌照区域内含有丰富的边缘包括水平边缘、垂直边缘和斜向边缘,而其它区域则很少具有这个特点,故可通过边缘检测技术来寻找存在较多边缘的区域,来很好的突现车牌区域的水平梯度特征,从而使其与背景图像有效的分开。边缘提取可以基于灰度图像,也可以基于彩色图像,由于彩色图像的背景复杂且数据量大,因此选择采用二值图像进行边缘提取。
FPGA实现:本项目采用初步选用sobel边缘检测算法,如图5所示。
Gx与Gy是x与y方向的模板,处理时需要将图像像素与模板做卷积。在用C语言实现该算法时很简单,因为图像像素都存储在二维数据内,根据数组的下标即可获取像素的值,但Verilog不能做到这点,因此需采用其他方法,下面以Gx与图像卷积为例来说明用Verilog的实现方法。
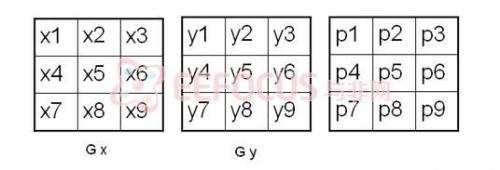
图5 Sobel边缘检测模板
检测过程中需要实现下面的运算:
X1 * P1 + X2 * P2 + X3 * P3 + X4 * P4 + X5 * P5 + X6 * P6 + X7 * P7 + X8 * P8 + X9 * P9
对于x1-x9的获取很简单,可用parameter直接定义,而对于p1-p9的获取就成为关键问题,因为p1-p9是依次传入的,没有C语言的位址概念,也没有二维数组的概念,因此可设计3条line buf
- 一种边缘检测与扫描线相结合的车牌定位算法(06-14)
- 车牌定位在电子警察中的工程应用(06-15)
- 一种利用Hough变换和先验知识的车牌识别新方法(06-13)
- 基于支持向量机的车牌定位方法(08-26)
- 智能交通系统之车牌定位及GPS定位经典案例汇总(11-15)
- Turn Key解决方案:汽车车牌定位识别系统的设计实现(09-02)