毫米波雷达新趋势——级联与79GHz
个概念,表示一个系统有多个输入和多个输出.如果将移动通信系统的传输信道看成一个系统,则发射信号可看成移动信道(系统)的输入信号,而接收信号可看成移动信道的输出信号。IM O 雷达的基本含义是:雷达采用多个发射天线,同时发射相互正交的信号,对目标进行照射,然后用多个接收天线接收目标回波信号并对其进行综合处理,提取目标的空间位置和运动状态等信息。
MIMO雷达虚拟阵的一个典型应用是用于雷达二维成像,雷达二维成像的距离分辨力 主要取决于雷达信号的带宽,方位分辨力主要取决于天线的波束宽度。要提高成像的距离分辨力,需要增加雷达信号的带宽是相对比较容易的。而要提高雷达信号的方位分辨力,需要增大天线或阵列的孔径,而这在实际中受到多方面因素的限制,有很大的难度。目前广泛采用的解决办法是采用合成孔径技术,在不增加天线物理尺寸的基础上,得到大孔径的阵列。与合成孔径的思想不同,MIMO 雷达是利用多发多收的天线结构等效形成虚拟的大孔径阵列,获得方位上的高分辨力。而这种虚拟阵的形成是实时的,能够避免传统的ISAR成像中存在的运动补偿问题。 故MIMO 雷达在成像应用上有其独特的优势。
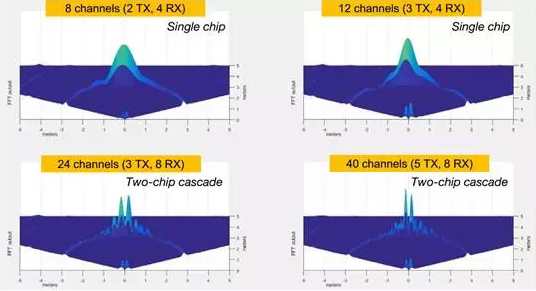
上图为德州仪器测试的多片级联雷达(MIMO)的FFT输出图,很明显通道数越多,精细程度就越高。
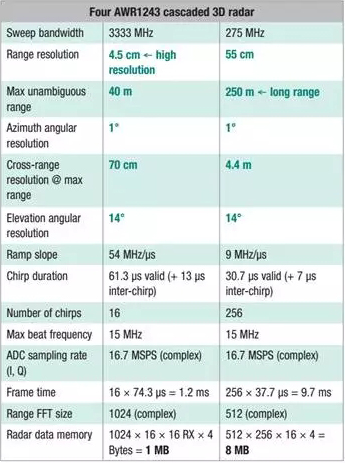
上表为德州仪器4个AWR1243级联后雷达的参数,远距离分辨力大大提高,40米处可以做到1度的方位角分辨率,也就是4.5厘米的精度和大约9厘米的物体分离精度。如果是百万像素45度FOV的摄像头,那么40米处只有大约20像素的方位角分辨率,无法分清行人和骑行者。MIMO具备很宽的FOV,像德州仪器这种4个级联的雷达FOV高达192度。而摄像头的话80度的FOV 都算是广角了,边缘处可能有广角失真。
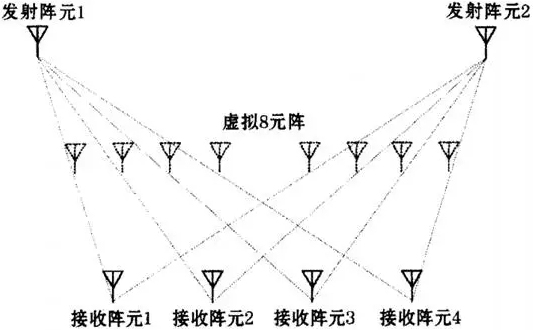
一对发射阵元和接收阵元可以虚拟出一个收发阵元,则对于M发N收的MIMO雷达 ,发射阵元和接收阵元共有M* N对 ,即可以虚拟出M *N个收发阵元 ,其个数一般是远远大于N的,从而实现了阵列孔径的扩展。例如2发4收的MIMO雷达,可以形成8元的虚拟阵列。
德州仪器使用4个3发4收的AWR1243雷达,就是192个虚拟通道(天线或者叫阵列)。
79GHz雷达更适合CMOS RF工艺
毫米波雷达最突出的优势是价格低廉,即便是和视觉系统相比价格也不高。同时毫米波雷达是主动型器件,而视觉系统是被动型器件,主动型器件有比较广阔的挖掘潜力。被动型器件,cmos图像传感器自问世以来,整体结构未有变化。而收发器从SiGe转换为硅基CMOS后,性价比进一步提升。

79GHz很适合多个级联应用,对价格敏感程度更高,采用硅基CMOS的需求更强烈。早在2013年,松下和富士通就开发了79GHz的硅基CMOS工艺,NXP大约在2015年底推出79GHz硅基CMOS工艺雷达收发器芯片,为40纳米CMOS RF 工艺。
2016年6月,英飞凌和比利时IMEC推出28纳米CMOS RF 工艺的79GHz雷达收发器芯片。在2017年2月,老牌模拟IC半导体厂家ADI推出28纳米CMOS RF 工艺的79GHz雷达收发器芯片,ADI特别称之为Drive 360技术,推测也是采用多个雷达级联。
2017年4月,ADI则与瑞萨展开77/79GHz雷达合作,ADI将使用瑞萨的Autonomy平台的RH850/V1R-MMCU配合它家的毫米波雷达,据称这是一款针对毫米波雷达开发的MCU。
标准的无人驾驶系统中,激光雷达是主传感器,负责3D周边环境数字建模,提供SLAM。为路径规划和自主导航提供基础。摄像头主要是识别交通标识。毫米波雷达目前主要是两点应用,一是检测目标的移动速度然后与激光雷达融合,激光雷达也可以做到,但是毫米波雷达测速更加方便快捷。二是碰撞预警或避免碰撞。一旦侦测到有碰撞的潜在威胁,加速或减速来避免。可以称之为360度防撞雷达,这也是未来多个79GHz雷达的典型应用。
毫米波雷达 相关文章:
- 中国77-81GHz车用雷达无线电研究试验正式启动(01-04)
- 松下展示在自动化和车辆互联技术及ITS大数据解决方案领域的新亮点(10-28)
- 智能汽车与车联网测试技术巡回研讨会圆满结束(11-26)
- 英飞凌公布电源管理及射频业务系列解决方案最新进展(07-18)
- 美国国家仪器亮相2016汽车测试及质量监控博览会(09-26)
- 沈自所“眼立方”毫米波雷达首次进入海外市场(03-16)