永磁同步电动机在永磁同步电机矢量控制系统的应用
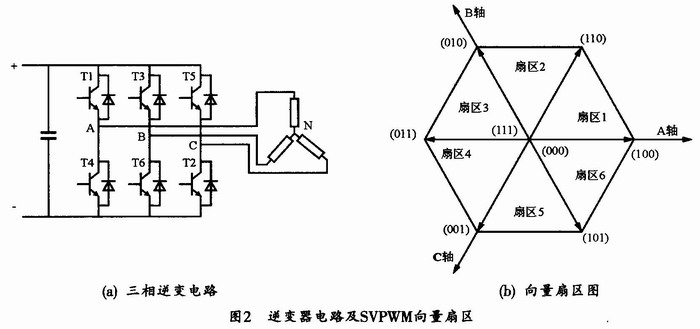
波电源,而SVPWM方法将逆变系统和异步电机看作一个整体来考虑,模型比较简单,也便于微处理器的实时控制。普通的三相全桥是由六个开关器件构成的三个半桥。 这六个开关器件组合起来(同一个桥臂的上下半桥的信号相反)共有8种安全的开关状态。 其中000、111(这里是表示三个上桥臂的开关状态)这两种开关状态在电机驱动中都不会产生有效的电流。因此称其为零矢量。另外6种开关状态分别是六个有效矢量。它们将360度的电压空间分为60度一个扇区,共六个扇区,利用这六个基本有效矢量和两个零量,可以合成360度内的任何矢量。
本文的矢量控制系统中的逆变器PWM采用的是电压空间矢量脉宽调制(SVPWM)技术。SVPWM技术主要是从电机的角度出发,它着眼于如何使电机获得幅值恒定的圆形旋转磁场(即正弦磁通)。三相负载相电压可以用一个空间电压矢量(目标矢量)来代替。通过控制三相逆变器开关器件的通断,可以得到用于合成目标矢量的基本矢量。图2所示是典型的三相逆变器电路及其SVPWM向量扇区图。图中引入了A、B、C桥臂的开关变量Sa、Sb、Sc,当某桥臂的上管导通而下管关断时,其开关变量值为1;当下管导通,上管关断时,开关变量值为0.因此,整个三相逆变器共有8种开关状态,即(SaSbSc)为(000)到(111),分别对应逆变器的8种输出电压矢量,其中2种为零矢量,6种非零矢量可将平面分为6个扇区。图3所示是产生SVPWM的具体实现步骤。其实现可通过Simulink模块库来搭建。
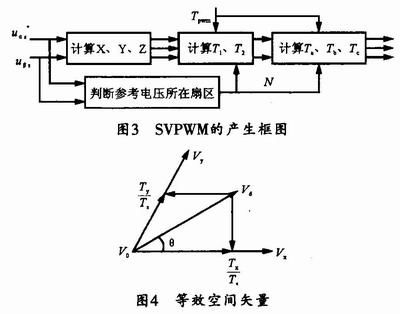
现以第一扇区为例来计算基本矢量的作用时间,其空间电压矢量Vd的位置如图4所示。假如在开关周期Ts内,矢量Vx、Vy、V0的作用时间分别为Tx、Ty、T0,则有:

式(7)中,Vph为相电压基波幅值,由(7)式可得到扇区中基本矢量Vx、Vy、V0的作用时间,并由此决定逆变器各开关状态的作用时间。
4 仿真分析
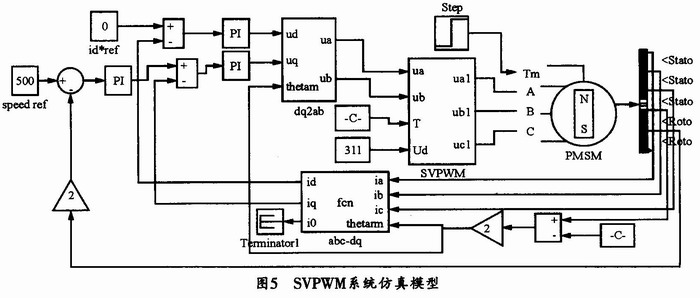
在MATLAB/simulink下所建立的该矢量控制系统的仿真模型如图5所示。该系统采用双闭环控制,外环为速度环,内环为电流环。仿真参数是:PMSM额定电压为380 V,频率为50 Hz,极对数p=2,Rs=2.85,纵轴和横轴电感Ld=Lq=2.21mH,转子磁通ψf=0.175Wb,三角载波周期T=0.0002s,幅值取T/2.直流侧电压Ud=310 V,转速给定初始值为500 rad/s.
本实验的目的是观察电机各输出量随转矩指令值变化的动,静态响应。实验中,在给定参考转速n=500rad/s的情况下,分别按转矩TL=0进行仿真,再按0~0.2s转矩从TL=2 N·m突变到TL=10N·m的动态仿真。仿真实验所得到的电流、转速和转矩波形如图6所示。

其中图6(a)是空载运行时的仿真结果,其稳态电流、转矩为0;图6(b)是电机以最大转矩启动时的仿真结果,由图可见,定子有短暂的冲击电流,但稳态电流波形较好,速度跟随也较快。综上所述可见,本实验具有转矩脉动小、电流波形好、系统响应迅速等优点。
5 结束语
本文对永磁同步电机矢量控制的基本原理及SVPWM调制方式进行了分析,并采用Matlab/simulink建立了该矢量控制系统的仿真模型,而且通过实验进行了验证。仿真和实验结果表明,该控制系统具有动、静态性能好,输出电流正弦度高等优点,可为分析和设计PMSM控制系统提供有效的手段和工具,也为实际电机控制系统的设计和调试提供了新的思路。
- 正弦波输出逆变电源的设计(07-12)
- 正弦波逆变器与UPS应用的区别(10-24)
- 单相正弦波逆变器容错控制研究(11-13)
- 晶闸管整流电路的功率因数是怎么定义的 与哪些因数有关?六个二极管的整流电路画法(04-02)
- LC正弦波振荡器电路设计图(08-12)
- 小型无线充电电子电路设计图(08-12)