电池管理经验之谈
引言
就混合动力汽车 (HEV) 和电动汽车 (EV) 而言,使用锂离子电池,可在功率、能量密度、效率和环境影响之间取得最佳平衡。但同时,锂离子电池也是易损坏和危险的,而汽车环境又相当棘手、难以应付。混合动力汽车和电动汽车的电子产品面临的挑战是,弥补要求苛刻的汽车环境和电池敏感性之间的差距。汽车环境的苛刻和电池的敏感堪称地狱中的绝配。
考虑到汽车对能量、功率和环境的要求,安全、可靠地使用大型锂离子电池组绝对不是一个简单的任务。锂离子电池以满充电状态或满放电状态工作时,容量会降低。考虑到循环往复的充电、组与组之间的差别和不同的环境条件,每节电池的容量都会随着时间推移而降低并产生偏离。因此,电池组要实现 15 年、5000 个充电周期的目标,每节电池都必须保持在有限的工作范围内工作。通过控制每节锂离子电池的充电状态 (SOC),可以最大限度地提高电池组的容量,同时最大限度地减轻容量的降低。确保高效率、安全地使用汽车电池组,是电池管理系统 (BMS) 的责任。
电池管理系统的任务是,仔细跟踪和控制每节电池的充电状态1。电池管理系统的测量准确度至关重要,因为它决定了每节电池能多么靠近其可靠充电状态范围的边缘工作。最大限度地提高可用容量的能力决定了所需的电池数量,而电池数量对成本和重量有很大的影响。准确地测量每节电池的电压相当困难,因为电池组中的电池易受高共模电压和高频噪声的影响。为了理解这一点,我们想想以下事实:电动汽车/混合动力汽车的电池组通常电压非常高,由 100 至 200 个串联连接的电池组成。这类电池组必须提供可能超过 200A 的快速充电和放电电流,在电池组的顶端,电压瞬态有可能超过 100V。
对成本和可靠性的关注导致汽车电子产品向集成度更高、组件数更少的方向发展。在高度复杂的电池管理系统中,这种趋势尤其明显,在这类系统中,我们看到,诸如凌力尔特 LTC6802 这类电池监视 IC 已经出现。在新式电池管理系统中,这类高度集成的器件是关键的数据采集组件,与之前的分立式解决方案相比,这类器件降低了成本、减少了所需占用的空间和组件数。电池监视器的主要功能是,直接测量串联连接电池的电压,典型情况下每个 IC 监视 12 个通道。这类 IC 中还包括电池容量平衡控制和额外的测量输入 (如用于温度的输入)。为了应对高压电池组,这类器件一般设计为通过菊花链式串行接口相互通信。在电池管理系统中,有一个组成部分一般不可能成功集成到电池监视 IC 中,那就是嵌入式软件。充电状态算法是受到严密保护的技术,是特定于化学组成、尺寸、外形、工作条件和应用的。就新式高压、大功率电池组而言,现成有售的算法不可能有用,嵌入式软件使故障机制影响分析 (FMEA) 变得复杂了,在使用嵌入式软件的情况下,系统设计师无法进行直接控制。图 1 说明了由任意节电池组成的电池模块的基本配置,其中电池组管理系统的算法是软件编码的,并由开发商独家控制。
1 充电状态控制要求电池容量平衡。通过有选择地给一些电池放电或移走电荷,可以实现电池容量平衡,从而使电池电压保持匹配,并处于特定范围之内。
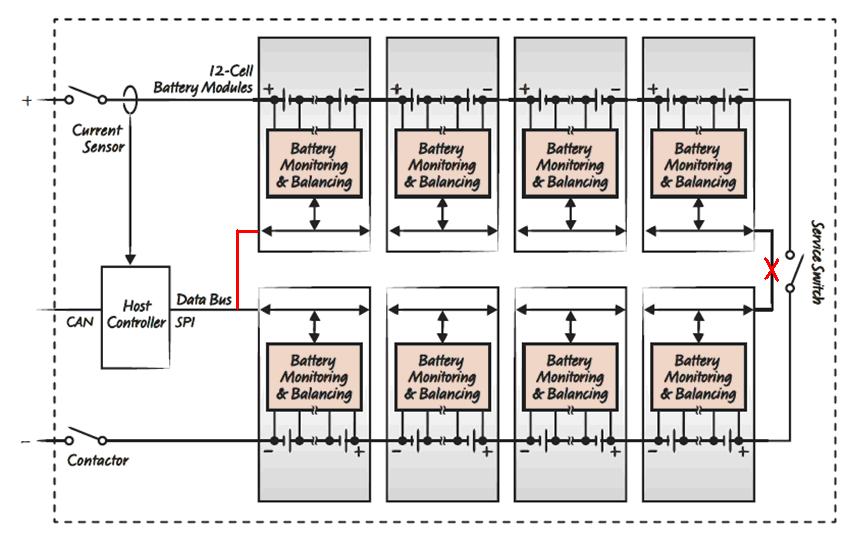
图 1:由很多节电池组成的电动汽车 / 混合动力汽车电池模块的基本拓扑
12-Cell Battery Modules:由 12 节电池组成的电池模块
Current Sensor:电流传感器
Host Controller:主控制器
Contactor:开关
Service Switch:检修开关
Battery Monitoring & Balancing:电池监视和容量平衡
电池监视 IC 的一个关键考虑因素是,怎样处理将遇到的汽车噪声。例如,很多电池监视器使用快速 SAR 转换器实现电池的数字化,在超过 100 个通道的数据采集系统中,这似乎是有利的。然而,汽车环境是有噪声的,需要进行大量的滤波,而且这种滤波决定有效吞吐量,而不是采样率。由于这个原因,增量累加 (??) ADC 比 SAR 转换器有优势。就给定的 10kHz 噪声抑制量而言,每秒 1000 次采样的 ?? ADC 提供的吞吐量与每秒 100 万次采样的 SAR ADC 提供的吞吐量相同。例如,LTC6802 采用一个每秒 1000 次采样的 ???ADC,该 ADC 在 10ms 时间内可顺序对 10 个输入通道采样。内置的线性相位数字滤波器对 10kHz 开关噪声提供 36dB 的抑制。要在 10kHz 时获得相同的噪声抑制,每秒 100 万次采样的
- 利用LTC6801进行电池管理系统 (BMS) 的故障监视(10-19)
- 电动 / 混合电动汽车电池管理系统的可靠性(11-09)
- 基于LabVIEW的电池管理系统监控平台开发(01-26)
- 怎样构成电池管理系统(08-08)
- 纯电动车电池管理系统设计(02-14)
- 专访:凌力尔特电池管理问答(07-15)