改进永磁同步电机转矩控制精度的措施
相反,如果相电流足够大,上侧电容将在下侧晶体管导通前充至直流源电压udc,如图11的右侧图所示。
阴影处所示的电压时间面积经周期时间tcycle的均分后,最终将导致电压偏差的产生,如公式(6)所示:
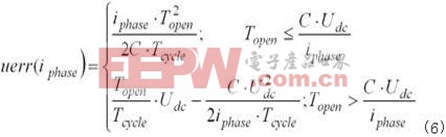
也即,较小相电流的情况下电压偏差是与电流成正比,而较大相电流的情况下,电压偏差与相电流成反比。
好在公式(6)中的电压误差模型可以通过近似处理,使其对大小电流都通用。如公式(7)所示,使用u0,i0构成的双参数双曲线模型进行近似处理:

当电机d轴转至电气位置的0°、120°和240°时,式中的两个参数u0,i0可以自动确定。这样,一个时变的电流将加在d轴上。去掉电阻上的压降后即可最终得到相电压偏差特性,同时两个参数也可通过最小二乘法估算得到。电压偏差对于三相来说几乎是相同的,所以只需确定一相即可。但是在实际正常的运行中,每相电压都需要添加公式(7)中所示的误差电压来进行补偿。
通过第四部分对在线自适应策略的讨论我们知道,这种电压补偿对于控制转矩精度是不可缺少的,尤其在低速和重载的情况下。对于在第三部分中讨论的kt(iq)多项式策略,电压补偿同样是有益的,但只在辨识过程中需要,在正常运行中并不需要。
结 语
本文介绍了三种不同的提高永磁同步电机静态转矩精度的策略。通过比较实际运行电机与数据手册上的数值对每种策略的优点进行了评估。
在电机转速和转矩不超过额定值,电机转子的温度变化被控制到最小,并有充分的电机模式预辨识的情况下,当达到额定转矩时,偏差可以控制在2%以内。作者建议在任何情况下都要进行电机参数辨识,不能依赖数据手册上所提供的数值。
当出现过载运行时,铁心饱和可能会导致不可接受的转矩精度偏差。尤其是专门为高性能机床主轴设计的转矩前馈也会因为铁心饱和而失效。使用kt(iq)多项式离线自适应策略配合之前确定的电机参数可以弥补这一缺陷,并且将转矩精度控制在额定转矩的±3%的范围内。但是要注意的是,实现这种有效控制的前提是电枢温度在电机参数辨识后不能有很明显的变化。
如果电机温升不能忽略或者公式(1)中所示的磁阻转矩常数不准确,则需要使用在线自适应技术。这一策略只能用在有足够转速以产生可测相电压的情况下使用。同时,需要知道相电压精确值,而这时很有必要采取进一步测量弥补逆变器的电压偏差。具备这种特征的典型电器有绞车,其需要转轴持续工作在额定功率附近。除此之外,主轴工作在去磁范围的永磁同步机床也是在线自适应控制策略的潜在适用对象。
文中讨论的每种策略都有其自身优点和特殊的适用范围,所以无法推荐一个普适性的方法来提高转矩精度。
- 基于Pi控制器的交流电机控制系统控制算法综述(01-18)
- 基于单片机的交流电机软启动器及其应用研究(02-16)
- 基于DSP的交流电机变频调速系统设计(03-31)
- 基于DSP的交流电机伺服控制器设计(10-20)
- 基于TMS320F2812的矢量变频调速系统研究(01-15)
- 基于DSP的感应电机SVPWM矢量控制系统(06-21)