基于单片机的交流电机软启动器及其应用研究
1 工作原理及硬件构成
该软启动器的硬件电路结构框图如图1.
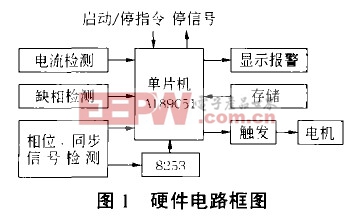
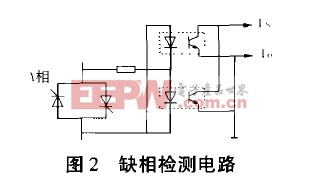
启动时(接到启动指令),从单片机输出口产生移相触发脉冲,通过控制串接在三相异步电动机绕组中的双向晶闸管的导通角α,使之实现斜坡方式减压启动。在电机运行中,实时检测电机功率因数,据此改变导通角α,实现节电运行。过流与过载检测采用常规电流互感器电路,经整流、滤波、放大、A/D转换及隔离后送人单片机,由软件完成数据处理及判断。缺相检测采用同时检测三相电源的方法以判断缺相故障。每相检测电路如图2所示。在晶闸管导通期间,该电路Vo应输出高电平信号,否则该相缺相(电流为零)。各相的检测信号也送入单片机进行处理及判断。
相位检测与同步信号产生电路见图3.A相电流、电压信号经光耦变为方波后送入异或门,定时/计数器8253的通道0(工作于方式2)用于检测A相电压与电流的相位差,电压过零时门控端GATE0得到高电平,开始计数,电流过零时GATEo变为低电平,计数停止。单片机在GATE.低电平期间读出计数值则可得到电压电流相位差。由8253的通道l、2(工作于方式5)延时实现触发脉冲的移相控制,A相电压过零为同步信号启动定时。通道l与单片机的定时/计数器T0配合控制l、2、3号晶闸管的导通时刻,通道2与单片机的定时/计数器T,配合控制4、5、6号晶闸管的导通时刻,T0、T1定时时间均为3.3ms,它是利用前一次定时中断启动下一次定时,而在一周期内分别产生相差3.3ms的三个触发控制脉冲。

启动(停)指令来自机床电气控制系统主控制器,按照加工工艺流程,要求该电动机启动(停)时,主控制器会发出启动(停)指令,则软启动器控制电机启动(停)。在机床设备中往往需要联锁控制,这样当电动机出现故障而停机保护时,就需向主控制器回馈一个停信号,主控制器随之可以进行联锁控制处理
2 控制软件
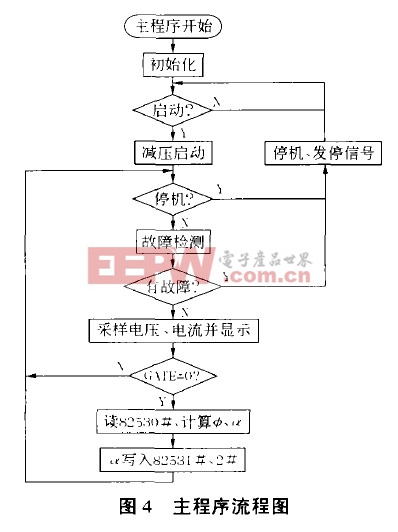
该软件的任务是控制硬件系统自动采集、检测输人信号,对输人数据进行判断与处理,按要求输出所需的控制信号。主程序流程图如图4所示。接到启动指令后首先启动电机,然后后进人循环工作过程直至接到停指令或故障停机。由于有较强功能的硬件电路的配合,使得主程序在每次循环中都能进行故障检测、电流值采样显示、功率因数角测量、触发脉冲移相和输出控制,因此做到了控制迅速,采样、故障诊断两不误。INTo与To中断程序实现的是1、2、3号晶闸管的触发脉冲移相与定位控制,其流程图见图5、图6.INT1与T1中断程序实现的是4、5、6号晶闸管的触发脉冲移相与定位控制,其流程图与图5、图6相似。


3 结语
采用单片机控制的三相异步电动机软启动器具有功能完善、运行可靠、使用方便、成本低廉等特点,满足了企业对设备的可靠性、生产效率和资源优化等方面的要求,具有一定的应用价值。
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)