基于TMS320F2812的矢量变频调速系统研究
时间:01-15
来源:作者:胡学芝
点击:
现代交流传动系统中,随着矢量控制、直接转矩控制等控制方法的出现和应用,使交流传动系统的性能有了明显的改善,矢量控制技术作为交流调速的首选方案之一,近年来得到不断的完善和改进。由于矢量控制策略较复杂,由模拟或模拟数字混合的实现方案存在电路复杂、一致性差、零漂等问题,因此应用高性能的数字信号处理器组成数字化矢量控制系统是目前热点研究方向。TMS320F2812是一款专为电机控制而设计的最新的32位定点DSP芯片,由于它具有成本低、功耗小、数据处理能力强、程序存储量大、运算速度快等特点,且与现有的24x/240x系列DSP控制芯片代码兼容,因此成为现代交流调速控制系统的首选芯片。本文首先建立了按转子磁场定向的异步电机矢量控制系统的模型,并利用TMS320LF2812DSP为核心控制芯片设计了一套矢量变频调速系统,构建了该系统的实验平台,给出了系统的硬件和软件组成方案,并进行了实验,给出了实验结果,实验结果表明了整个控制方案的可行性及系统的稳定性。
1 系统的数学模型及控制原理
1.1 交流异步电动机数学模型
为了分析方便,先对三相异步电机做如下理想化假定:1)、电机定转子三相绕组完全对称;2)、定转子表面光滑,无齿槽效应,定转子每相气隙磁动势在空间呈正弦分布;3)、磁饱和、涡流及铁心损耗忽略不计。
在以上条件下,经过从静止到旋转坐标系的变换,得到转子磁场定向控制方程式如下:
其中:为漏磁系数,τr为转子时间常数,Rs、Rr为电机定转子电阻;Ls、Lr、Lm分别为定转子自感和互感;p是微分算子;Usd、Usq是定子电压在dq轴上的分量;isd、isq是定子电流在dq轴上的分量;ψsd、ψsq是定子磁链在dq轴上的分量。
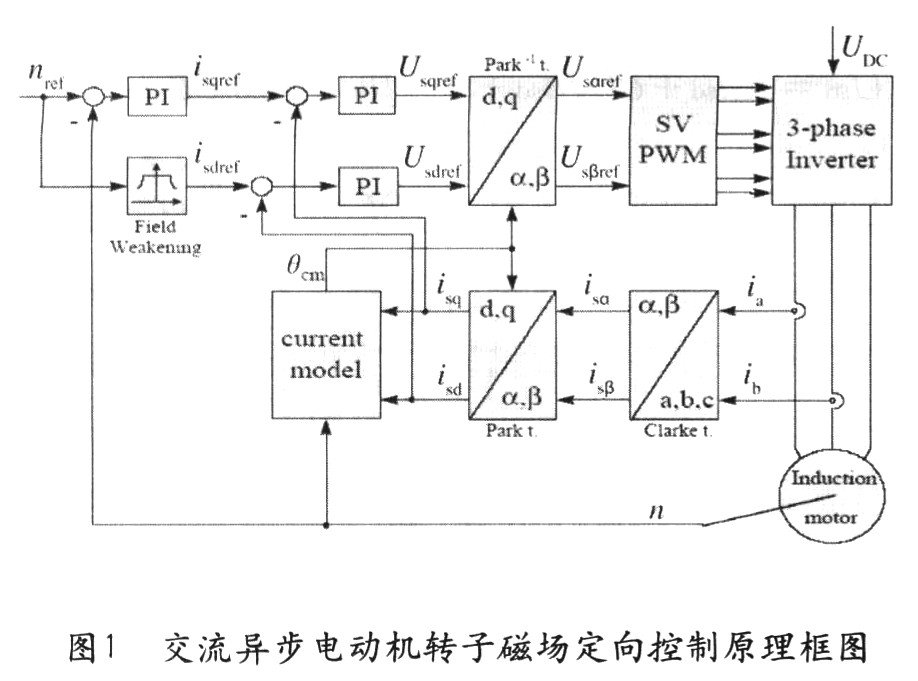
1.2 交流异步电动机转子磁场控制原理
图1是异步电机转子磁场定向控制原理框图。利用空间矢量分析法,采用磁场定向将定子电流进行CLARK变换和PARK变换(矢量变换),得到在dq坐标系下的励磁反馈电流isd和转矩反馈电流isq,与给定励磁电流isdref和转矩电流isqref比较,再经过PARK逆变换输出在αβ坐标下的电压,用来决定空间矢量的PWM波形输出;速度反馈一方面用于与给定速度比较产生isqref,另一方面进入电流模型决定磁链的位置,并用于PARK和CLARK逆变换。通过采样电机三相电流,经过坐标变换转换到转子的同步坐标下,再经过电流环PI调节出适当的电压矢量,经过空间矢量发生器后去控制三相逆变器。这里在进行坐标变换时需要知道转子轴的位置,即图1中的角θ,它可根据(3)、(4)式通过定子电流矢量和电机转子时间常数来获得这一角度。
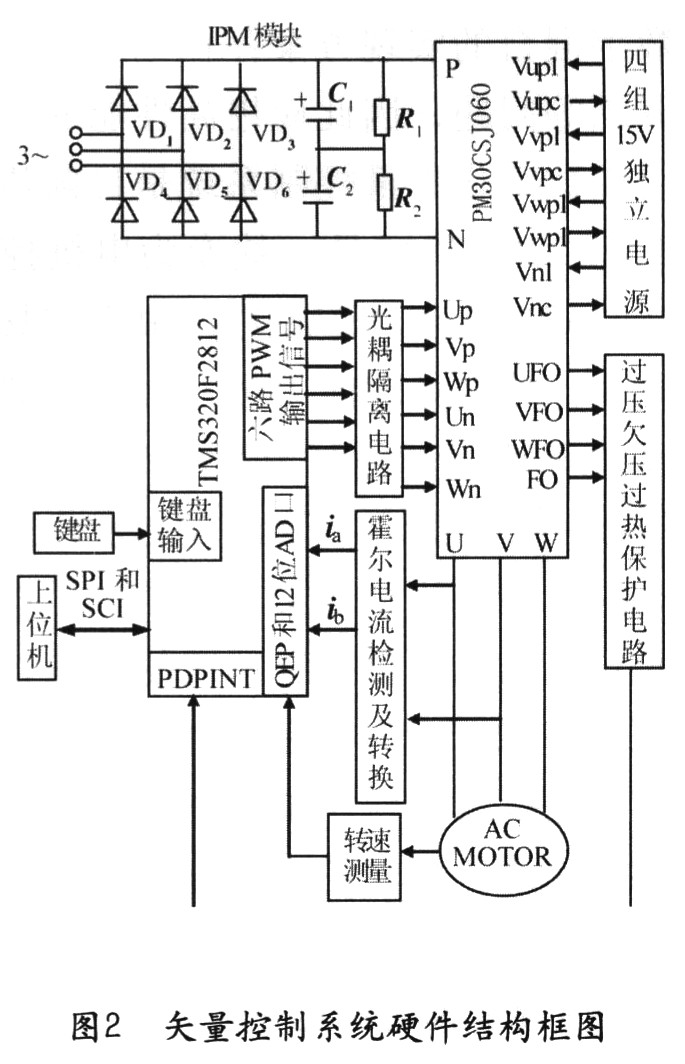
2.1 系统的硬件构成
图2是由TMS320F2812作为控制芯片的电机矢量控制系统硬件结构框图,整个系统由DSP作为主要控制元件的控制电路、用增量式光电编码器、霍尔传感器等组成的信号检测电路、驱动隔离和保护电路等几大部分组成;系统主电路采用交一直一交电压型变频器,主电路分为不控整流和逆变两部分,电感和电解电容构成低通滤波器对三相不控整流的输出进行滤波,为后级的逆变环节提供稳定的直流母线电压。滤波电感和滤波电容的值都取得较大以减小电压纹波。逆变部分选用了三菱智能IPM模块PM30CSJ060,该模块包含了由六个IGBT、六个续流二极管、栅极驱动电路、逻辑控制电路以及欠压、过流、短路、过热等保护电路。模块的主电路共有5个端子,P和N为直流电源输入正端和负端,U,V,W为三相逆变器输出端。控制部分包括PWM信号输入,过流、欠压、过压等故障信号以及驱动电源等,其中DSP生成的PWM信号需通过光耦合器隔离后输入。上臂三个单管分别使用三个独立的电源进行控制,三个下管则共用一个电源,光耦输入有驱动电流时,光耦隔离器件导通,这时IPM控制输入为低电平,其控制的IGBT、导通,当光耦输入无驱动电流或驱动电流不够大时,光耦隔离器件不导通,这时IPM控制的输入为高电平,其控制的IGBT不导通。Up、Vp、Wp是与变频器直流输入正端P相接的各开关管控制输入端,Ufo,Vfo,Wfo是模块内部各个开关管的保护输出端,Un、Vn、Wn则是与变频器直流输入负端N相接的各管的控制输入端,FO是它们共同的保护输出端。PM30CSJ060的自保护电路中,任何一相保护电路动作,将产生一低电平,而且各相保护电路的故障信号(如过流、过压、欠压等)输出相与,所得信号送入DSP的PDPINT中断口(低电平有效),当DSP收到低电平信号时,作出中断处理,封锁PWM输出。
1 系统的数学模型及控制原理
1.1 交流异步电动机数学模型
为了分析方便,先对三相异步电机做如下理想化假定:1)、电机定转子三相绕组完全对称;2)、定转子表面光滑,无齿槽效应,定转子每相气隙磁动势在空间呈正弦分布;3)、磁饱和、涡流及铁心损耗忽略不计。
在以上条件下,经过从静止到旋转坐标系的变换,得到转子磁场定向控制方程式如下:
其中:为漏磁系数,τr为转子时间常数,Rs、Rr为电机定转子电阻;Ls、Lr、Lm分别为定转子自感和互感;p是微分算子;Usd、Usq是定子电压在dq轴上的分量;isd、isq是定子电流在dq轴上的分量;ψsd、ψsq是定子磁链在dq轴上的分量。
1.2 交流异步电动机转子磁场控制原理
图1是异步电机转子磁场定向控制原理框图。利用空间矢量分析法,采用磁场定向将定子电流进行CLARK变换和PARK变换(矢量变换),得到在dq坐标系下的励磁反馈电流isd和转矩反馈电流isq,与给定励磁电流isdref和转矩电流isqref比较,再经过PARK逆变换输出在αβ坐标下的电压,用来决定空间矢量的PWM波形输出;速度反馈一方面用于与给定速度比较产生isqref,另一方面进入电流模型决定磁链的位置,并用于PARK和CLARK逆变换。通过采样电机三相电流,经过坐标变换转换到转子的同步坐标下,再经过电流环PI调节出适当的电压矢量,经过空间矢量发生器后去控制三相逆变器。这里在进行坐标变换时需要知道转子轴的位置,即图1中的角θ,它可根据(3)、(4)式通过定子电流矢量和电机转子时间常数来获得这一角度。
2.1 系统的硬件构成
图2是由TMS320F2812作为控制芯片的电机矢量控制系统硬件结构框图,整个系统由DSP作为主要控制元件的控制电路、用增量式光电编码器、霍尔传感器等组成的信号检测电路、驱动隔离和保护电路等几大部分组成;系统主电路采用交一直一交电压型变频器,主电路分为不控整流和逆变两部分,电感和电解电容构成低通滤波器对三相不控整流的输出进行滤波,为后级的逆变环节提供稳定的直流母线电压。滤波电感和滤波电容的值都取得较大以减小电压纹波。逆变部分选用了三菱智能IPM模块PM30CSJ060,该模块包含了由六个IGBT、六个续流二极管、栅极驱动电路、逻辑控制电路以及欠压、过流、短路、过热等保护电路。模块的主电路共有5个端子,P和N为直流电源输入正端和负端,U,V,W为三相逆变器输出端。控制部分包括PWM信号输入,过流、欠压、过压等故障信号以及驱动电源等,其中DSP生成的PWM信号需通过光耦合器隔离后输入。上臂三个单管分别使用三个独立的电源进行控制,三个下管则共用一个电源,光耦输入有驱动电流时,光耦隔离器件导通,这时IPM控制输入为低电平,其控制的IGBT、导通,当光耦输入无驱动电流或驱动电流不够大时,光耦隔离器件不导通,这时IPM控制的输入为高电平,其控制的IGBT不导通。Up、Vp、Wp是与变频器直流输入正端P相接的各开关管控制输入端,Ufo,Vfo,Wfo是模块内部各个开关管的保护输出端,Un、Vn、Wn则是与变频器直流输入负端N相接的各管的控制输入端,FO是它们共同的保护输出端。PM30CSJ060的自保护电路中,任何一相保护电路动作,将产生一低电平,而且各相保护电路的故障信号(如过流、过压、欠压等)输出相与,所得信号送入DSP的PDPINT中断口(低电平有效),当DSP收到低电平信号时,作出中断处理,封锁PWM输出。
 Vupl一Vupc,Vvpl一Vvpc,Vwpl-Vwpc,Vnl-Vnc所加的电压
Vupl一Vupc,Vvpl一Vvpc,Vwpl-Vwpc,Vnl-Vnc所加的电压
DSP TMS320F2812 矢量变频调速 矢量控制 相关文章:
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)