基于TMS320F2812的矢量变频调速系统研究
时间:01-15
来源:作者:胡学芝
点击:
范围为13.5V~16.5V,本系统采用典型的电压值15V;加在PN端子上的电压范围为0~380V。
2.2 TMS320F2812芯片简介及由它组成的控制模块
TMS320F2812是控制电路的核心,为一款最新的电机控制专用DSP芯片,它是TI公司在TMS320C2000平台上使用32位内核的DSP,运行速度可达150MIPS,实时处理能力强,能应用于很多复杂的控制算法;高性能低功率,采用1.8V内核电压和3.3V外围接口电压;片上有128kFlash和1 8k内部Saram,可外扩1M的统一编址存储器,应用起来更加灵活方便、快速;两个事件管理模块为电机控制提供了良好的控制功能;另外还有16路12bitA/D可灵活设置采样方式;拥有两个SCI口和一个SPI口,增加了数据缓存能力,传输频率可达MHz量级;串行通讯模块还包括增强的eCAN总线和新增的McBSP,能满足多种通讯的需要,这些可省去复杂的外围电路,提高了系统的集成度和可靠性。
系统的电流检测电路如图3示,由于电机绕组是对称的,因此只检测两相电流ia和ib,本系统是采用霍尔传感器来检测电机电流ia和ib的。图3为ia相电流检测电路,由图可见,先将电流霍尔检测到的电流ia经过信号比例放大,全波整流,输出供TMS320F2812的A/D口的ADCINl(ib的测量送入ADCIN2)进行采样,将模拟量转换成数字量,然后进行相应处理。TMS320F2812的A/D模块具有l 2位精度,这为提高系统的控制精度创造了条件,其电流采样的分辨率达到1/290。
2.3 系统软件设计
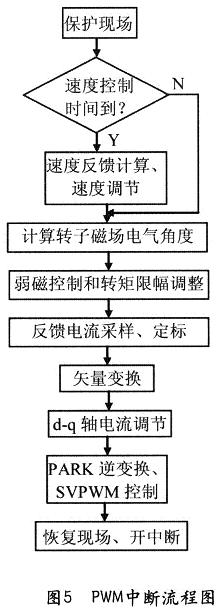
系统的软件主要包括主程序与中断服务子程序,主程序主要完成的功能是芯片的初始化、变量的定义以及初始化;各种特殊功能模块的初始化,如通讯接口、输入输出口、时间管理器、AD转换的初始化;系统的启动、停机的控制等。中断子程序的是整个控制的主要部分,主要采用了事件管理器的Tl下溢中断,在每个中断周期内,要完成各种采样信号的AD转换,电路的PI调节控制,逆变电路开关管的输出占空比的在线实时计算,以及各种软件的保护功能的实现。子程序包括:速度测量子程序,光电编码脉冲计数子程序,模相电流检测子程序,电流环和速度环的数字PI调节子程序,PARK变换和逆变换子程序,CLARKE变换子程序,空间矢量产生和PWM波形发生子程序等。图4是速度PI调节程序流程图,图5是PWM定时中断子程序流程图。
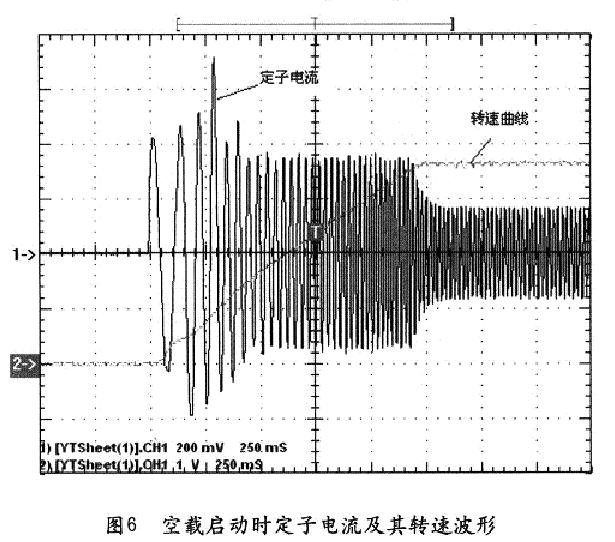
根据上述对主电路,控制电路等各个部分设计,应用TMS320F2812为主控芯片搭建了实验系统,本实验采用鼠笼式异步电动机,其参数如下:额定转速1440r/min,频率50Hz,额定电压:380V,额定电流:8.8A;异步电动机带的是同轴的他励直流发电机,其参数如下:额定转速1450r/min,额定电压:230V,额定励磁电压:220V,额定励磁电流:0.79A。SVPWM的开关频率设为10kHz,死区时间不小于2.5μs。电流环的参数整定为:kp=4.5,ki=12,转速环的参数整定为:kp=60,ki=0.8,实验波形采用数字示波器测量得到,电流波形每100mV代表电流值是1A,转速波形每1V代表的转速是400转/分钟。
图6是空载启动时定子电流和转速曲线的波形(图中:定子电流:横轴:250ms/格,纵轴:2A/格;转速:横轴:250ms/格,纵轴:400转/分/格),启动时间大约需1.25秒钟,启动电流比稳态时大2倍。
矢量控制系统具有高的动静态性能,但其控制的实时运算量大,运用DSP芯片作为主控芯片可有效地解决实际矢量控制实现时运算量大而引起的实时性问题,而TMS320F2812作为一种新型DSP芯片,在电机控制领域有着优异的性能,获得了越来越多的应用。本文以TMS320F2812和PM30CSJ060为核心组成的矢量控制变频调速系统,系统硬件结构简单,实验表明系统稳定可靠,故障保护快,动态性能好,控制精度高,是一种理想的矢量控制实现方案。
2.2 TMS320F2812芯片简介及由它组成的控制模块
TMS320F2812是控制电路的核心,为一款最新的电机控制专用DSP芯片,它是TI公司在TMS320C2000平台上使用32位内核的DSP,运行速度可达150MIPS,实时处理能力强,能应用于很多复杂的控制算法;高性能低功率,采用1.8V内核电压和3.3V外围接口电压;片上有128kFlash和1 8k内部Saram,可外扩1M的统一编址存储器,应用起来更加灵活方便、快速;两个事件管理模块为电机控制提供了良好的控制功能;另外还有16路12bitA/D可灵活设置采样方式;拥有两个SCI口和一个SPI口,增加了数据缓存能力,传输频率可达MHz量级;串行通讯模块还包括增强的eCAN总线和新增的McBSP,能满足多种通讯的需要,这些可省去复杂的外围电路,提高了系统的集成度和可靠性。
系统的电流检测电路如图3示,由于电机绕组是对称的,因此只检测两相电流ia和ib,本系统是采用霍尔传感器来检测电机电流ia和ib的。图3为ia相电流检测电路,由图可见,先将电流霍尔检测到的电流ia经过信号比例放大,全波整流,输出供TMS320F2812的A/D口的ADCINl(ib的测量送入ADCIN2)进行采样,将模拟量转换成数字量,然后进行相应处理。TMS320F2812的A/D模块具有l 2位精度,这为提高系统的控制精度创造了条件,其电流采样的分辨率达到1/290。

2.3 系统软件设计
系统的软件主要包括主程序与中断服务子程序,主程序主要完成的功能是芯片的初始化、变量的定义以及初始化;各种特殊功能模块的初始化,如通讯接口、输入输出口、时间管理器、AD转换的初始化;系统的启动、停机的控制等。中断子程序的是整个控制的主要部分,主要采用了事件管理器的Tl下溢中断,在每个中断周期内,要完成各种采样信号的AD转换,电路的PI调节控制,逆变电路开关管的输出占空比的在线实时计算,以及各种软件的保护功能的实现。子程序包括:速度测量子程序,光电编码脉冲计数子程序,模相电流检测子程序,电流环和速度环的数字PI调节子程序,PARK变换和逆变换子程序,CLARKE变换子程序,空间矢量产生和PWM波形发生子程序等。图4是速度PI调节程序流程图,图5是PWM定时中断子程序流程图。

根据上述对主电路,控制电路等各个部分设计,应用TMS320F2812为主控芯片搭建了实验系统,本实验采用鼠笼式异步电动机,其参数如下:额定转速1440r/min,频率50Hz,额定电压:380V,额定电流:8.8A;异步电动机带的是同轴的他励直流发电机,其参数如下:额定转速1450r/min,额定电压:230V,额定励磁电压:220V,额定励磁电流:0.79A。SVPWM的开关频率设为10kHz,死区时间不小于2.5μs。电流环的参数整定为:kp=4.5,ki=12,转速环的参数整定为:kp=60,ki=0.8,实验波形采用数字示波器测量得到,电流波形每100mV代表电流值是1A,转速波形每1V代表的转速是400转/分钟。
图6是空载启动时定子电流和转速曲线的波形(图中:定子电流:横轴:250ms/格,纵轴:2A/格;转速:横轴:250ms/格,纵轴:400转/分/格),启动时间大约需1.25秒钟,启动电流比稳态时大2倍。

矢量控制系统具有高的动静态性能,但其控制的实时运算量大,运用DSP芯片作为主控芯片可有效地解决实际矢量控制实现时运算量大而引起的实时性问题,而TMS320F2812作为一种新型DSP芯片,在电机控制领域有着优异的性能,获得了越来越多的应用。本文以TMS320F2812和PM30CSJ060为核心组成的矢量控制变频调速系统,系统硬件结构简单,实验表明系统稳定可靠,故障保护快,动态性能好,控制精度高,是一种理想的矢量控制实现方案。
DSP TMS320F2812 矢量变频调速 矢量控制 相关文章:
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)