基于DSP的感应电机SVPWM矢量控制系统
1引言
近年来交流变频调速系统发展很快,已成为调速系统的主要研究和发展方向。1971年提出的矢量控制理论根据磁动势等效原则,应用坐标变换将三相系统等效为二相系统,再经过按磁场定向的同步旋转变换实现了定子电流励磁分量与转矩分量之间的解耦,从而达到对交流电机的磁链和电流分别控制的目的。这样就可将一台三相异步电动机等效为直流电机来控制,因而获得了与直流调速系统同样的静、动态性能。
2矢量控制的原理
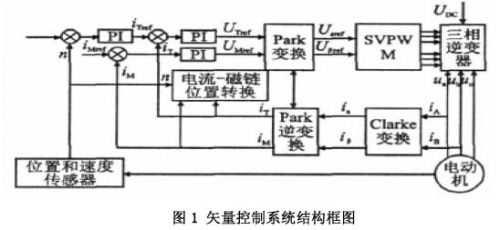
矢量控制也称为磁场定向控制,其基本思路是模拟直流电机来控制,根据磁动势和功率不变的原则通过坐标变换,将三相静止坐标变换成两相静止坐标(即 Clarck变换),然后通过旋转变换将两相静止坐标变成两相旋转坐标(即 Park变换),在 Park变换下将定子电流矢量分解成按转子磁场定向的两个直流分量iM ,iT(其中iM称为励磁电流分量, iT为转矩电流分量),并对其分别加以控制。控制 iM就相当于控制磁通,而控制 iT就相当于控制转矩。通过解耦,控制交流电动机和控制直流电动机一样方便,图 1所示为矢量控制的结构框图。
3电压空间矢量 SVPWM的原理
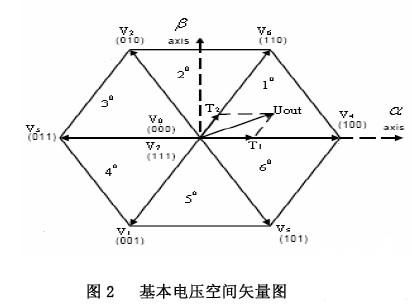
空间电压矢量调制法是以三相对称正弦波电压供电时交流电机的理想磁通圆为基准,用逆变器不同的开关模式所产生的实际磁通去逼近基准圆磁通,并由它们比较的结果决定逆变器的开关状态,形成 PWM波形。位于同一桥臂的功率管的导通状态是相反的。当位于同一桥臂的上面的功率管导通时,下桥臂的功率管一定是关断的。假设功率管导通状态为1,关断状态为0,我们只通过上桥臂功率管的开关状态(这里表示成开关向量[ a,b,c]T,可以推

假定 Uout处于1 0扇区中,定义 T1、T2和T0分别为向量 V4、V6、V0(或V7)的持续时间,T为载波 PWM的周期。由以下两式可算出 T1、T2和 T0:


4系统硬件实现
该系统采用交-直-交电压型变频电路。主电路由整流电路、滤波电路、开关电源电路、电流检测电路及智能功率模块 IPM逆变电路等构成。主电路的整流部分是由不可控二极管组成的,在设计主电路的时候,选用了智能型器件IPM。IPM是 IGBT智能化功率模块,它将IGBT芯片、驱动电路、保护电路等封装在一个模块内,不但便于使用,而且大大有利于装置的小型化、高性能化和高频化,设有过流和短路保护,欠电压保护。系统结构框图见图4。系统控制电路以 TMS320F2812芯片为核心,外扩 RAM构成功能齐全的矢量控制系统,系统参数由上位机通过通信接口下传给下位机,DSP负责采样各相电流,计算电机的转速和位置,最后运用矢量控制算法,得到 SVPWM控制信号,经过光耦隔离电路后,驱动逆变器功率开关器件,同时 DSP还监控变频系统的运行状态,当系统出现短路、过流、过压、过热等故障时,DSP将封锁SVPWM信号,使电机停止运行。
系统控制回路主要包括了 DSP微处理器系统,数据采集和控制信号I/O电路,驱动电路,保护电路等子系统。
5系统软件设计
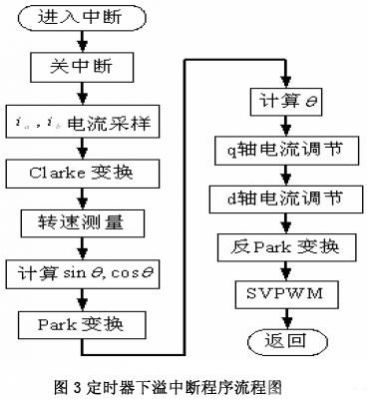
此系统中对感应电机的所有控制都是通过 F2812 的软件来完成的。软件程序由主程序和定时器下溢中断子程序组成。主程序中进行硬件和变量初始化,对各个控制寄存器置初值,对运算过程中使用的各种变量分配地址并设置相应的初值。中断子程序的工作是在每一个PWM 周期里, 计算出下一个 PWM 周期的三个比较寄存器的比较值, 并送到比较寄存器中。中断服务子程序是系统的核心部分,执行 SVPWM调制,故障处理中断等。系统软件的定时器下溢中断程序流程见图3。
6实验结果与结论
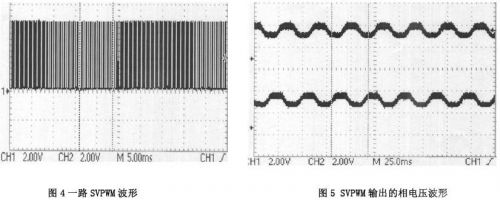
结合交流电机控制系统,用 C语言编写了载波频率为2KHz,变频范围为0~100Hz的SVPWM控制程序。驱动的电机为三相异步电动机,定子绕组星形结法。采用 TMS320F2812每周期内只发生一次定时器周期中断,实时性好,而且占用 CPU较少,使CPU有很大能力去完成其它任务。图4,图 5为 DSP输出的一路 SVPWM波形及调制信号 30Hz时控制器输出经过低通滤波后的相电压波形。
采用 TMS320F2812和 IPM等模块化的芯片,利用电压空间矢量调制技术构成的感应电机矢量控制系统,输出电流的谐波成分减少, 硬件电路简单, 系统的动态响应、控制精度有很大提高, 复杂算法得以实现。采用 DSP结合先进控制算法的矢量控制系统在感应电机的控制中将有广泛的应用前景。
本文作者创新点是应用更新一代的 DSP芯片 TMS320F2812,以及采用具有更多保护功能的 IPM来构成控制系统,简化了外围电路,应用数字信号处理芯片实现软件算法使控制精度进一步提高,响应更加快速。
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)