智能PWM控制的机车制动控制单元的设计
1 引 言
随着我国国民经济的蓬勃发展和人民生活水平的日益提高,铁路的客、货运量将越来越大,列车牵引重量与运行速度将不断提高。高速客运及重载货运列车的发展对列车制动系统提出了更高更新的要求。
国外发达国家都是采用微机应用先进控制理论实现对机车制动气缸的精确控制。而在我国机车上广泛使用的DK-l和JZ-7型制动机只能对机车实现一些简单的逻辑控制功能,不能实现对机车制动缸和均衡风缸的闭环控制,难以满足机车制动控制的需要。随着电子技术及微机控制技术应用的日渐成熟,有必要应用现代电子技术和先进的控制理论,利用微机的强大功能实现对机车的精确制动。 目前世界各国铁路绝大多数仍采用空气制动,要实现对气体压力的控制,特别是小流量压力控制,就应考虑明显的非线性和不确定性。另外,负载的不确定性导致了整个系统模型的不确定,经典的控制方法及依赖于具体数学模型的现代控制理论都难以实现系统控制的要求,在这种情况下,将智能控制方法和常规控制方法相结合有望取得更好的控制效果。
本文介绍了一种基于智能脉冲宽度调制(Pulse WidthModulation,PWM)控制的机车制动控制单元的设计和实现方法。对制动机气缸的高速电控阀实王见PWM控制,也就是通过调节信号的占空比米实现对高速电控阀一定周期内开闭时间的控制。
通过建立机车制动机气缸模糊控制规则,运用模糊推理来实现PID控制,从而实现了机车的精确制动。这样就有效解决了目前我国的DK-1和JZ-7型制动机不能实现精确制动的问题,对提高我国机车的安全运行和信息化程度有着极大的促进作用。
2 系统硬件结构
机车制动控制单元(Brake Control Unit,BCU)主要分为以下几个部分:模拟量输入、模拟量输出、数字量输入、数字量输出、PWM输出、微处理器部分以及与外围部分的通信等,系统整体结构图如图1所示。
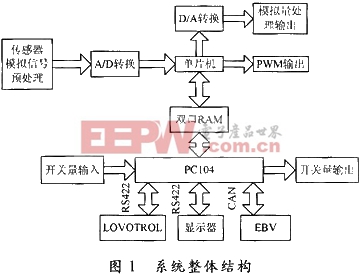
其中模拟量输入部分主要是包括传感器模拟信号预处理和A/D转换,信号预处理主要是将从传感器上获得的4~20 mA电流信号转换为A/D转换所需要的电压信号。通过处理,我们就可以得到气缸压力,A/D转换的精度直接关系到气缸压力控制的精度。为了满足控制的需要,在本系统中选用了16位的A/D转换芯片,采样实验表明,采样值偏差很小,在允许的误差范围内。
微机处理部分实际上包含了2个微处理器,一个是单片机,另外一个是PC104。他们实现不同的功能,他们之间通过双口RAM实现高速数据通信。单片机主要是实现对模拟量A/D转换控制、D/A转换控制以及智能PWM控制等。由于PC104功能强大,能够实现更强大的数据处理功能。PC104主要是将获得的数字输入量通过数据处理后输出数字量。另外,通过PC104快速数据处理和软件的强大功能还使制动控制单元具有机车制动机监控及故障检测、诊断、显示、告警、记录、单机自动测试等功能。在本系统中,实现对气缸压力的精确控制是由单片机来完成的,PC104通过对各种信号如模拟量、数字量等信号的处理得到需要气缸所需要达到的压力值,单片机通过双口RAM得到压力值,应用智能PWM控制实现对压力的精确控制,这一部分将在下面章节进行详细介绍。
3 分段控制
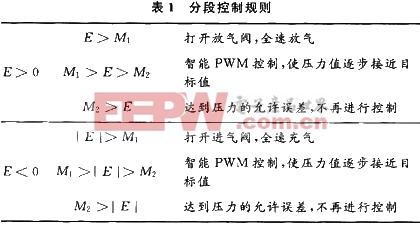
为了实现对机车制动机气缸既能精确控制,又能够快速达到目标值,我们对气缸压力实行分段控制。单片机有4路开关量输出,分别对应制动缸的进气阀、放气阀和均衡风缸的进气阀、放气阀,输出1代表打开阀门,0代表关闭阀门。我们以pt表示压力目标值,pi表示当前气缸压力值,E表示偏差值。所以,有E=pi-pt。M1,M2表示压力偏差的绝对值,其中M1>M2,M1表示在接近目标值的一个值,M2表示允许的最大误差,分段控制规则如表1所示。
4 智能PWM控制
4.1 智能PID介绍
PID控制是较早发展起来的控制策略之一,由于算法简单、鲁棒性好、可靠性高而广泛用于过程控制和运动控制中,尤其适用于能建立精确数学模型的控制系统。但由于实际工业生产过程往往是非线性和时变不确定性的,难以建立精确的数学模型,因此常规PID控制器很难达到理想控制效果。
近年来,智能控制无论是理论上还是技术应用上均得到了长足的发展,随之不断涌现将智能控制方法和常规PID控制方法融合在一起的新方法,形成了许多智能PID控制器。这些智能控制器不仅具备自学习、自适应、自组织的能力,而且还有常规PID控制器结构简单、鲁棒性强、可靠性高、为现场工程设计人员所熟悉等特点。目前主要有4种智能PID控制:基于专家智能PID控制、基于模糊推理的PID控制、基于神经网络的PID控制、基于遗传算法的PID控制。
在本系统中,采用基于模糊推理的PID控制来
- 基于DSP的磁流变阻尼器的控制方法(04-14)
- 基于DSP并使用SPWM控制技术的变频器实现方案(12-21)
- 飞思卡尔那些事之PWM控制直流电机(11-23)
- 51单片机IO模拟PWM控制舵机转向(11-22)
- 51单片机PWM控制电机(11-19)
- PWM控制LED灯的亮度(C 语言)(11-17)